チュートリアル:モデル階層とパラメーター化の使用
PIDコントローラーとモデルの動的挙動を水タンクモデルに追加する方法を学習します。コンテキスト変数を使用してモデルをパラメーター化する方法およびスーパーブロックをマスクしてモデル階層の詳細を非表示にする方法を学習します。
このチュートリアルのファイル
Watertank.scm
水タンク問題の概要
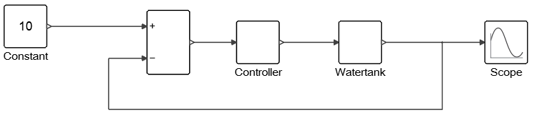
水タンクモデルで、タンクへの水の流量を調整するPIDコントローラーを追加します。
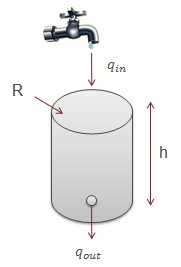
次の流動方程式は水タンクモデルを表しています。
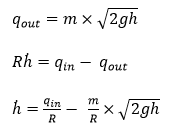
タンクへの水の流入率qinを制御すると、指定された時間内で水位hに達することができます。このシステムモデルの入力と出力はそれぞれ1つのみ(qinとqout)なので、水の流量を制御するには従来型のPIDコントローラーを追加する必要があります。
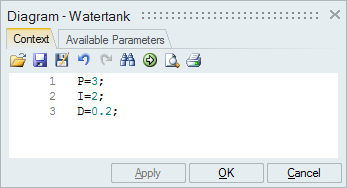
PIDコントローラーは、基本的な代数ブロックと積分ブロックから構成されるスーパーブロックとして組み込みます。PIDコントローラーの比例項、積分項、微分項の係数は、OMLコマンドで編集可能なコンテキスト変数として定義されます。
スーパーブロック内のコントローラーはマスクされ、通常のActivateブロックのように見えます。スーパーブロックの内容はマスクによって非表示になりますが、スーパーブロックをダブルクリックするとPIDパラメーターにアクセスすることはできます。
PIDコントローラーの構築
水流を調節するPIDコントローラーによるモデルを作成します。
-
ribbonで、Filesツールグループの
 をクリックします。
をクリックします。
-
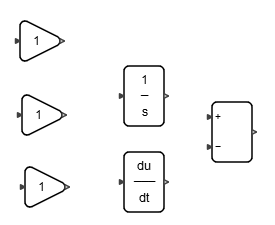
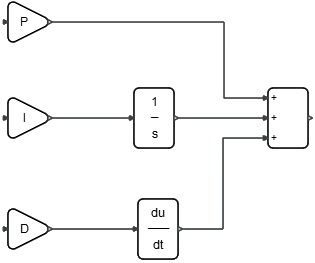
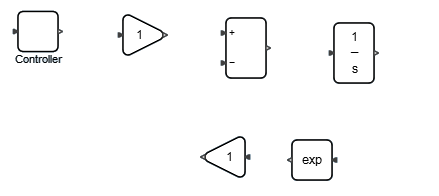
ブロックを次の図のように配置します:
-
各Gainブロックをダブルクリックし、ゲイン(Gain)パラメーターの値を入力してOKをクリックします。
- 上側のGainブロックについてはPと入力します。
- 中央のGainブロックについてはIと入力します。
- 下側のGainブロックについてはDと入力します。
NoteColonSymbol パラメーターに、値であるP、I、Dを割り当てることにより、その値が本チュートリアルの後の部分で定義するコンテキスト変数を表すことを示しています。ブロックは次の図のようになります:
-
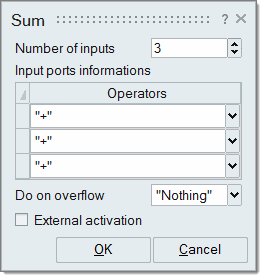
Sumブロックをダブルクリックします。入力数(Number of inputs)に3と入力します。Signsテーブルのすべての入力に“+”を割り当てます:
-
ブロックを次の図のように接続してリンクを調整します。
-
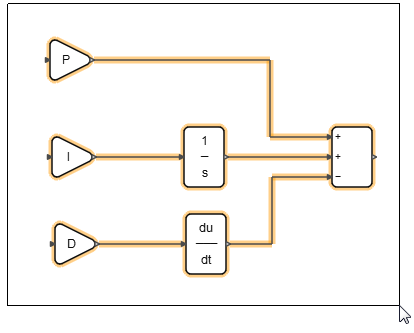
領域内をクリックしてカーソルをドラッグし、すべてのブロックを領域選択します。
-
リボンでスーパーブロックの作成ツール
 を選択します。
ダイアグラムにあるブロックがスーパーブロックに変換されます。
を選択します。
ダイアグラムにあるブロックがスーパーブロックに変換されます。
-
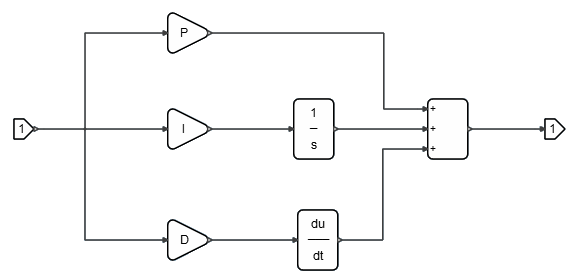
ブロックを次の図のように接続します:
-
最上位のダイアグラムを表示するには、モデリングウィンドウの空白領域でダブルクリックします。
入力ポートと出力ポートがスーパーブロックに接続されていることを確認します。

-
スーパーブロックの名前を変更するため、F2キーを押し、Controllerと入力します。
スーパーブロックの名前がControllerに変わります。

水タンクの動的挙動のモデル化
3つの流れの方程式に基づいて水タンクの動的挙動を構築します。
-
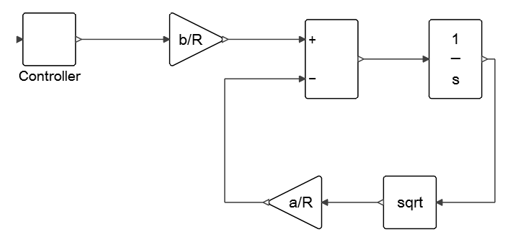
ブロックを次の図のように配置します。
-
ブロックを次のように接続します:
-
ブロックを次のように組み立てて接続します:
-
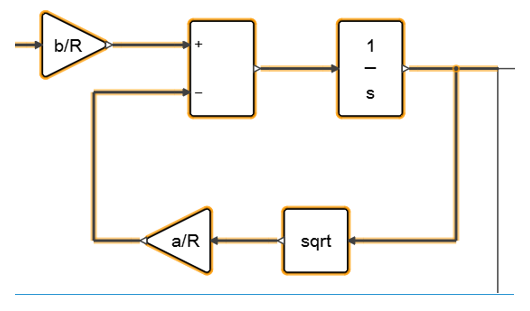
ダイアグラム上でクリック&ドラッグによる領域選択で、次の図のように複数のブロックを選択します:
-
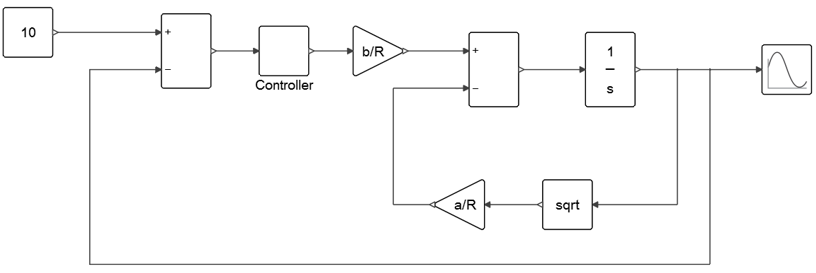
ダイアグラム内の他のブロックに対するWatertankブロックの接続を次のように修正します。
コンテキスト変数の定義
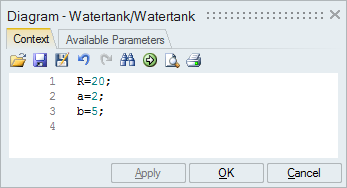
ダイアグラムダイアログのコンテキストタブで、メインコンテキスト変数とローカルコンテキスト変数の値を入力します。
-
ルートダイアグラムの空白領域を右クリックしてコンテキストを選択するか、メニューバーからダイアグラムツール
 を選択します。
ダイアグラムダイアログが開きます。
を選択します。
ダイアグラムダイアログが開きます。 -
コンテキストタブで、次の図に示すようにOMLコマンドを入力してからOKをクリックします。
-
コンテキストタブで、次の図に示すようにOMLコマンドを入力してからOKをクリックします。
-
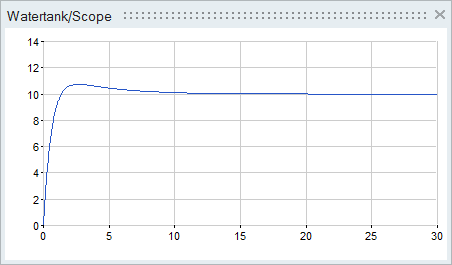
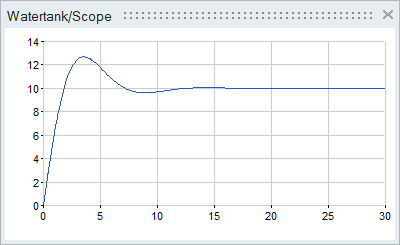
Scopeのビューをウィンドウにフィットさせるには、マウスの中央ボタンをクリックします。
このカーブは、水タンクの水位が指定水位である10に達したあと、それが維持されることを示しています。
スーパーブロックのマスク
Controllerスーパーブロックをマスクして、P、I、Dの各パラメーターを調整します。
-
ルートダイアグラムでControllerスーパーブロックを選択します。リボンから、自動マスクツール
 を選択します。
このスーパーブロックが自動的にマスクされます。
を選択します。
このスーパーブロックが自動的にマスクされます。 -
Controllerスーパーブロックを選択してから、リボンでマスクの編集
 ツールを選択します。
ツールを選択します。
-
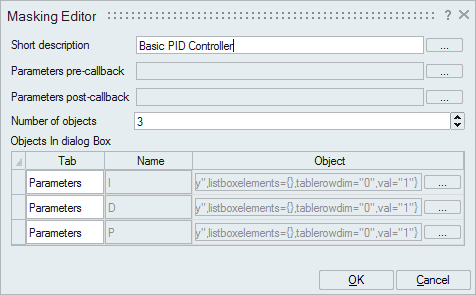
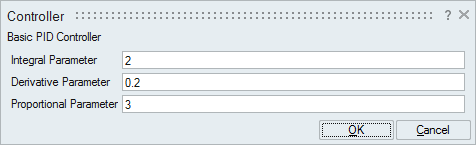
表示されたマスクエディターダイアログで、概要(Short Description )欄にBasic PID Controllerと入力します。
-
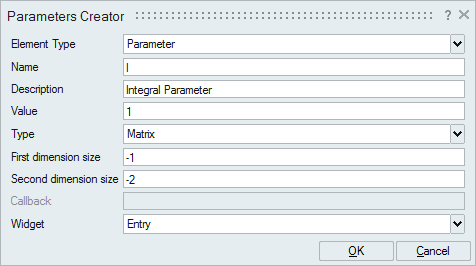
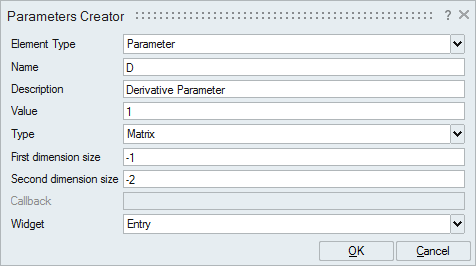
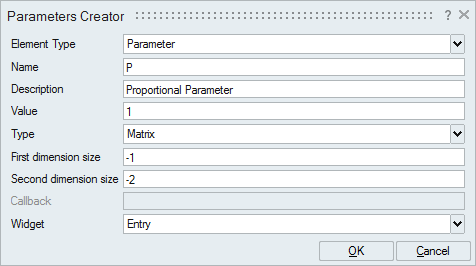
パラメーターごとに
 をクリックします。表示されたパラメーター作成ダイアログで、次の図に示す情報を入力してOKをクリックします。
をクリックします。表示されたパラメーター作成ダイアログで、次の図に示す情報を入力してOKをクリックします。
-
パラメーター情報を入力すると、テーブルは次のようになります。

-
Controllerスーパーブロックをダブルクリックします。パラメーターの説明が更新されているはずです。次の図に示す数値をパラメーターに入力します:
-
リボンで実行
 を選択します。
シミュレーションが開始されます。Scopeウィンドウに以下の結果のプロットが表示されます:
を選択します。
シミュレーションが開始されます。Scopeウィンドウに以下の結果のプロットが表示されます: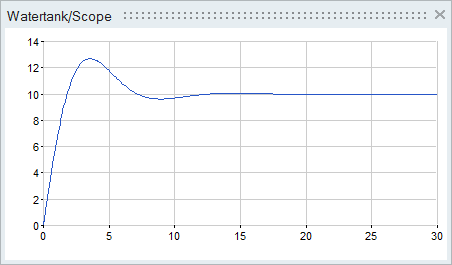
-
もう一度シミュレーションを実行します。プロットは次の図のようになります。