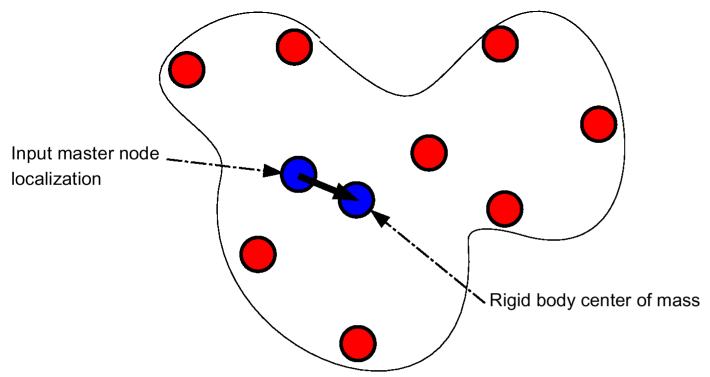
A rigid body is defined by a main node and its associated secondary nodes. Mass and inertia may
be added to the initial main node location. The main node is then moved to the center of mass,
taking into account the main node and all secondary node masses.
Figure 1 shows an idealized rigid body.
Figure 1. Idealized Rigid Body
Rigid Body Mass
The mass of the rigid body is calculated by:
(1)
m
=
m
M
+
∑
I
m
I
The rigid body's center of mass is defined by:
(2)
x
G
=
m
M
x
M
+
∑
m
I
x
I
m
(3)
y
G
=
m
M
y
M
+
∑
m
I
y
I
m
(4)
z
G
=
m
M
z
M
+
∑
m
I
z
I
m
Where,
m
M
Main node mass
m
I
Secondary node masses
x
G
,
y
G
,
z
G
Coordinates of the mass center
Rigid Body Inertia
The six components of inertia of a rigid body are computed by:
(5)
I
x x
=
J
x x
M
+
m
M
(
(
y
M
−
y
G
)
2
+
(
z
M
−
z
G
)
2
) +
∑
i
(
I
x x
i
+
m
i
(
(
y
i
−
y
G
)
2
+
(
z
i
−
z
G
)
2
)
)
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamysamaaBa
aaleaacaWG4bGaamiEaaqabaGccqGH9aqpcaWGkbWaa0baaSqaaiaa
dIhacaWG4baabaGaamytaaaakiabgUcaRiaad2gadaahaaWcbeqaai
aad2eaaaGcdaqadaqaamaabmaabaGaamyEamaaBaaaleaacaWGnbaa
beaakiabgkHiTiaadMhadaWgaaWcbaGaam4raaqabaaakiaawIcaca
GLPaaadaahaaWcbeqaaiaaikdaaaGccqGHRaWkdaqadaqaaiaadQha
daWgaaWcbaGaamytaaqabaGccqGHsislcaWG6bWaaSbaaSqaaiaadE
eaaeqaaaGccaGLOaGaayzkaaWaaWbaaSqabeaacaaIYaaaaaGccaGL
OaGaayzkaaGaey4kaSYaaabuaeaadaqadaqaaiaadMeadaqhaaWcba
GaamiEaiaadIhaaeaacaWGPbaaaOGaey4kaSIaamyBamaaCaaaleqa
baGaamyAaaaakmaabmaabaWaaeWaaeaacaWG5bWaaSbaaSqaaiaadM
gaaeqaaOGaeyOeI0IaamyEamaaBaaaleaacaWGhbaabeaaaOGaayjk
aiaawMcaamaaCaaaleqabaGaaGOmaaaakiabgUcaRmaabmaabaGaam
OEamaaBaaaleaacaWGPbaabeaakiabgkHiTiaadQhadaWgaaWcbaGa
am4raaqabaaakiaawIcacaGLPaaadaahaaWcbeqaamaaCaaameqaba
GaaGOmaaaaaaaakiaawIcacaGLPaaaaiaawIcacaGLPaaaaSqaaiaa
dMgaaeqaniabggHiLdaaaa@7007@
(6)
I
y y
=
J
y y
M
+
m
M
(
(
x
M
−
x
G
)
2
+
(
z
M
−
z
G
)
2
) +
∑
i
(
I
y y
i
+
m
i
(
(
x
i
−
x
G
)
2
+
(
z
i
−
z
G
)
2
)
)
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamysamaaBa
aaleaacaWG5bGaamyEaaqabaGccqGH9aqpcaWGkbWaa0baaSqaaiaa
dMhacaWG5baabaGaamytaaaakiabgUcaRiaad2gadaahaaWcbeqaai
aad2eaaaGcdaqadaqaamaabmaabaGaamiEamaaBaaaleaacaWGnbaa
beaakiabgkHiTiaadIhadaWgaaWcbaGaam4raaqabaaakiaawIcaca
GLPaaadaahaaWcbeqaaiaaikdaaaGccqGHRaWkdaqadaqaaiaadQha
daWgaaWcbaGaamytaaqabaGccqGHsislcaWG6bWaaSbaaSqaaiaadE
eaaeqaaaGccaGLOaGaayzkaaWaaWbaaSqabeaacaaIYaaaaaGccaGL
OaGaayzkaaGaey4kaSYaaabuaeaadaqadaqaaiaadMeadaqhaaWcba
GaamyEaiaadMhaaeaacaWGPbaaaOGaey4kaSIaamyBamaaCaaaleqa
baGaamyAaaaakmaabmaabaWaaeWaaeaacaWG4bWaaSbaaSqaaiaadM
gaaeqaaOGaeyOeI0IaamiEamaaBaaaleaacaWGhbaabeaaaOGaayjk
aiaawMcaamaaCaaaleqabaGaaGOmaaaakiabgUcaRmaabmaabaGaam
OEamaaBaaaleaacaWGPbaabeaakiabgkHiTiaadQhadaWgaaWcbaGa
am4raaqabaaakiaawIcacaGLPaaadaahaaWcbeqaamaaCaaameqaba
GaaGOmaaaaaaaakiaawIcacaGLPaaaaiaawIcacaGLPaaaaSqaaiaa
dMgaaeqaniabggHiLdaaaa@7009@
(7)
I
z z
=
J
z z
M
+
m
M
(
(
x
M
−
x
G
)
2
+
(
y
M
−
y
G
)
2
) +
∑
i
(
I
z z
i
+
m
i
(
(
x
i
−
x
G
)
2
+
(
y
i
−
y
G
)
2
)
)
MathType@MTEF@5@5@+=
feaagKart1ev2aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamysamaaBa
aaleaacaWG6bGaamOEaaqabaGccqGH9aqpcaWGkbWaa0baaSqaaiaa
dQhacaWG6baabaGaamytaaaakiabgUcaRiaad2gadaahaaWcbeqaai
aad2eaaaGcdaqadaqaamaabmaabaGaamiEamaaBaaaleaacaWGnbaa
beaakiabgkHiTiaadIhadaWgaaWcbaGaam4raaqabaaakiaawIcaca
GLPaaadaahaaWcbeqaaiaaikdaaaGccqGHRaWkdaqadaqaaiaadMha
daWgaaWcbaGaamytaaqabaGccqGHsislcaWG5bWaaSbaaSqaaiaadE
eaaeqaaaGccaGLOaGaayzkaaWaaWbaaSqabeaacaaIYaaaaaGccaGL
OaGaayzkaaGaey4kaSYaaabuaeaadaqadaqaaiaadMeadaqhaaWcba
GaamOEaiaadQhaaeaacaWGPbaaaOGaey4kaSIaamyBamaaCaaaleqa
baGaamyAaaaakmaabmaabaWaaeWaaeaacaWG4bWaaSbaaSqaaiaadM
gaaeqaaOGaeyOeI0IaamiEamaaBaaaleaacaWGhbaabeaaaOGaayjk
aiaawMcaamaaCaaaleqabaGaaGOmaaaakiabgUcaRmaabmaabaGaam
yEamaaBaaaleaacaWGPbaabeaakiabgkHiTiaadMhadaWgaaWcbaGa
am4raaqabaaakiaawIcacaGLPaaadaahaaWcbeqaamaaCaaameqaba
GaaGOmaaaaaaaakiaawIcacaGLPaaaaiaawIcacaGLPaaaaSqaaiaa
dMgaaeqaniabggHiLdaaaa@700C@
(8)
I
x y
=
J
x y
M
+
m
M
(
(
x
M
−
x
G
)
+
(
y
M
−
y
G
)
) +
∑
i
(
I
x y
i
−
m
i
(
(
x
i
−
x
G
)
+
(
y
i
−
y
G
)
)
)
MathType@MTEF@5@5@+=
feaagKart1ev2aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamysamaaBa
aaleaacaWG4bGaamyEaaqabaGccqGH9aqpcaWGkbWaa0baaSqaaiaa
dIhacaWG5baabaGaamytaaaakiabgUcaRiaad2gadaahaaWcbeqaai
aad2eaaaGcdaqadaqaamaabmaabaGaamiEamaaBaaaleaacaWGnbaa
beaakiabgkHiTiaadIhadaWgaaWcbaGaam4raaqabaaakiaawIcaca
GLPaaadaahaaWcbeqaaaaakiabgUcaRmaabmaabaGaamyEamaaBaaa
leaacaWGnbaabeaakiabgkHiTiaadMhadaWgaaWcbaGaam4raaqaba
aakiaawIcacaGLPaaadaahaaWcbeqaaaaaaOGaayjkaiaawMcaaiab
gUcaRmaaqafabaWaaeWaaeaacaWGjbWaa0baaSqaaiaadIhacaWG5b
aabaGaamyAaaaakiabgkHiTiaad2gadaahaaWcbeqaaiaadMgaaaGc
daqadaqaamaabmaabaGaamiEamaaBaaaleaacaWGPbaabeaakiabgk
HiTiaadIhadaWgaaWcbaGaam4raaqabaaakiaawIcacaGLPaaadaah
aaWcbeqaaaaakiabgUcaRmaabmaabaGaamyEamaaBaaaleaacaWGPb
aabeaakiabgkHiTiaadMhadaWgaaWcbaGaam4raaqabaaakiaawIca
caGLPaaadaahaaWcbeqaamaaCaaameqabaaaaaaaaOGaayjkaiaawM
caaaGaayjkaiaawMcaaaWcbaGaamyAaaqab0GaeyyeIuoaaaa@6D1E@
(9)
I
y z
=
J
y z
M
+
m
M
(
(
y
M
−
y
G
)
+
(
z
M
−
z
G
)
) +
∑
i
(
I
y z
i
−
m
i
(
(
y
i
−
y
G
)
+
(
z
i
−
z
G
)
)
)
MathType@MTEF@5@5@+=
feaagKart1ev2aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamysamaaBa
aaleaacaWG5bGaamOEaaqabaGccqGH9aqpcaWGkbWaa0baaSqaaiaa
dMhacaWG6baabaGaamytaaaakiabgUcaRiaad2gadaahaaWcbeqaai
aad2eaaaGcdaqadaqaamaabmaabaGaamyEamaaBaaaleaacaWGnbaa
beaakiabgkHiTiaadMhadaWgaaWcbaGaam4raaqabaaakiaawIcaca
GLPaaadaahaaWcbeqaaaaakiabgUcaRmaabmaabaGaamOEamaaBaaa
leaacaWGnbaabeaakiabgkHiTiaadQhadaWgaaWcbaGaam4raaqaba
aakiaawIcacaGLPaaadaahaaWcbeqaaaaaaOGaayjkaiaawMcaaiab
gUcaRmaaqafabaWaaeWaaeaacaWGjbWaa0baaSqaaiaadMhacaWG6b
aabaGaamyAaaaakiabgkHiTiaad2gadaahaaWcbeqaaiaadMgaaaGc
daqadaqaamaabmaabaGaamyEamaaBaaaleaacaWGPbaabeaakiabgk
HiTiaadMhadaWgaaWcbaGaam4raaqabaaakiaawIcacaGLPaaadaah
aaWcbeqaaaaakiabgUcaRmaabmaabaGaamOEamaaBaaaleaacaWGPb
aabeaakiabgkHiTiaadQhadaWgaaWcbaGaam4raaqabaaakiaawIca
caGLPaaadaahaaWcbeqaamaaCaaameqabaaaaaaaaOGaayjkaiaawM
caaaGaayjkaiaawMcaaaWcbaGaamyAaaqab0GaeyyeIuoaaaa@6D2C@
(10)
I
x z
=
J
x z
M
+
m
M
(
(
x
M
−
x
G
)
+
(
z
M
−
z
G
)
) +
∑
i
(
I
x z
i
−
m
i
(
(
x
i
−
x
G
)
+
(
z
i
−
z
G
)
)
)
MathType@MTEF@5@5@+=
feaagKart1ev2aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamysamaaBa
aaleaacaWG4bGaamOEaaqabaGccqGH9aqpcaWGkbWaa0baaSqaaiaa
dIhacaWG6baabaGaamytaaaakiabgUcaRiaad2gadaahaaWcbeqaai
aad2eaaaGcdaqadaqaamaabmaabaGaamiEamaaBaaaleaacaWGnbaa
beaakiabgkHiTiaadIhadaWgaaWcbaGaam4raaqabaaakiaawIcaca
GLPaaadaahaaWcbeqaaaaakiabgUcaRmaabmaabaGaamOEamaaBaaa
leaacaWGnbaabeaakiabgkHiTiaadQhadaWgaaWcbaGaam4raaqaba
aakiaawIcacaGLPaaadaahaaWcbeqaaaaaaOGaayjkaiaawMcaaiab
gUcaRmaaqafabaWaaeWaaeaacaWGjbWaa0baaSqaaiaadIhacaWG6b
aabaGaamyAaaaakiabgkHiTiaad2gadaahaaWcbeqaaiaadMgaaaGc
daqadaqaamaabmaabaGaamiEamaaBaaaleaacaWGPbaabeaakiabgk
HiTiaadIhadaWgaaWcbaGaam4raaqabaaakiaawIcacaGLPaaadaah
aaWcbeqaaaaakiabgUcaRmaabmaabaGaamOEamaaBaaaleaacaWGPb
aabeaakiabgkHiTiaadQhadaWgaaWcbaGaam4raaqabaaakiaawIca
caGLPaaadaahaaWcbeqaamaaCaaameqabaaaaaaaaOGaayjkaiaawM
caaaGaayjkaiaawMcaaaWcbaGaamyAaaqab0GaeyyeIuoaaaa@6D25@
Where,
I
i
j
Moment of rotational inertia in the
i j
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamyAaiaadQ
gaaaa@37D3@
J
i
j
M
Main node added inertia
Rigid Body Force And Moment
Computation
The forces and moments acting on the rigid body are calculated by:
(11)
F
→
=
F
→
M
+
∑
i
F
→
i
(12)
M
→
=
M
→
M
+
∑
i
M
→
i
+
∑
i
S
i
G
→
×
F
→
i
Where,
F
→
M
Force vector at the main node
F
→
i
Force vector at the secondary nodes
M
→
M
Moment vector at the main node
M
→
i
Moment vector at the secondary nodes
G
→
Vector from secondary node to the center of mass
Resolving these into orthogonal components, the linear and rotational acceleration may be computed as:
Linear Acceleration
(13)
γ
i
=
F
i
m
Rotational Acceleration
(14)
I
1
α
1
=
M
1
−
(
I
3
−
I
2
)
ω
2
ω
3
(15)
I
2
α
2
=
M
2
−
(
I
1
−
I
3
)
ω
1
ω
3
(16)
I
3
α
3
=
M
3
−
(
I
2
−
I
1
)
ω
1
ω
2
Where,
I
i
Principal moments of inertia of the rigid body
α
1
Rotational accelerations in the principal inertia frame (reference frame)
ω
i
Rotational velocity in the principal inertia frame (reference frame)
M
i
Moments in the principal inertia frame (reference frame)
Time Integration
Time integration is performed to find velocities of the rigid body at the main
node:
(17)
ν
→
(
t
+
Δ
t
2
)
=
ν
→
(
t
−
Δ
t
2
)
+
γ
→
(
t
)
Δ
t
(18)
ω
→
(
t
+
Δ
t
2
)
=
ω
→
(
t
−
Δ
t
2
)
+
α
→
(
t
)
Δ
t
Where,
v
→
is the linear velocity vector. Rotational velocities are computed
in the local reference frame.
The velocities of secondary nodes are computed by:
(19)
ν
→
i
=
ν
→
M
+
S
i
G
→
x
ω
→
(20)
ω
⇀
i
=
ω
→
M
Boundary Conditions
The boundary conditions given to secondary nodes are ignored. The rigid body has the boundary
conditions given to the main node only.
A kinematic condition is applied on each secondary node, for all directions. A secondary node is
not allowed to have any other kinematic conditions.
No kinematic condition is applied on the main node. However, the rotational velocities are
computed in a local reference frame. This reference frame is not compatible with all options
imposing rotation such as imposed velocity, rotational, rigid link.
The only exception concerns the rotational boundary conditions for which a special treatment is
carried out. Connecting shell, beam or spring with rotation stiffness to the main node, is not
yet allowed either.