OAFormulation
弾性体のすべての点の全変位場
は、ボディの剛体運動を定義する局所フレームの変位と、ボディの小振動に対応する追加の局所変位場
から得られます。
図 1.
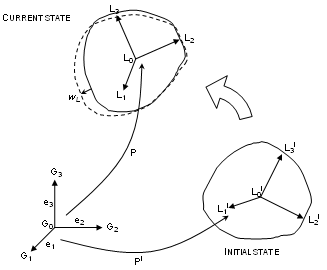
(
、
、
および
)は、全体フレーム(
、
および
を定義します。
(
、
、
および
)は、直交局所フレームを定義します。
は、(
、
、
および
)から(
、
、
および
)への回転マトリックスです。
よって、全変位
は次のように表現できます:
(1)
ここで、
、
、
、
はそれぞれ点
、
、
、
の変位です。
、
、
は、局所フレーム(
、
、
、
)での座標です。
は、全変位に対する剛体の影響度です。
局所変位は、局所振動モード
の結合によって次のように与えられます:
(2)
ここで、
は局所モードの影響度を示すベクトルです。
剛体の変位
は、12種類のモードの結合としても表現できます:
(3)
ここで、投影モード
は局所座標から得られます:
(4)
局所フレーム(
、
、
、
)は全面的に任意に選択できます。これらの点は明示的に入力する必要がありません。これらの位置によって局所座標が決まり、それによってモード
の成分が定義されます。
回転自由度を設定した要素が弾性体に存在している場合は、さらに3つのモードを
ファミリーに追加して、これらの自由度に伴う慣性を考慮する必要があります。回転自由度を設定した弾性体の各節点におけるこれらの追加モードの成分は以下のとおりです:
(5)