MV-7021: MotionSolve/EDEMの連成シミュレーション
本チュートリアルでは、MotionViewを介したMotionSolveとEDEMの連成のセットアップと実行について学びます。
MotionSolveは、先進のバルク材挙動シミュレーションツールであるAltair EDEMとインターフェースをとる機能を有しています。EDEMは、砂、細礫、錠剤、草、岩石といった粉体の挙動を解析する離散要素法技術(DEM: Discrete Element Method)をベースとしています。 この解析法の詳細については、www.edemsimulation.com、およびMotionSolveユーザーズガイド内のMotionSolveでの離散要素法シミュレーショントピックをご参照ください。
本チュートリアルは、AltairのMotionSolve/MotionViewとEDEM両方の最低限の知識を前提としています。
- 必要条件
- MotionSolveとEDEMとの間で首尾よく連成を行うには、以下の条件が必要です:
ソフトウェア バージョン HyperWorks 剛体連成の場合は2019.1以降 弾性体連成の場合は2021以降
EDEM 剛体連成の場合は2019.1以降 弾性体連成の場合は2020.3.1以降
- 問題の定義
- この問題は、中心軸回りにのみ回転が可能なホイールから成ります。ホイールのブレードに多数の粒子が衝突し、それを回転させています。ホイールはMotionSolveでモデル化され、粒子およびホイールと粒子との相互作用はEDEMでモデル化されます。最初に、剛体ホイールと粒子の相互作用を設定します。その後、ホイールを弾性体に置き換え、弾性体と粒子の相互作用を確認します。
Motionモデルのセットアップ
-
StandardツールバーのImport Geometry
 をクリックします。
Import Geometryダイアログが表示されます。
をクリックします。
Import Geometryダイアログが表示されます。 -
Fileブラウザ
 を使って、<作業ディレクトリ>からwheel.stepを探して選択します。
を使って、<作業ディレクトリ>からwheel.stepを探して選択します。
-
OKをクリックします。
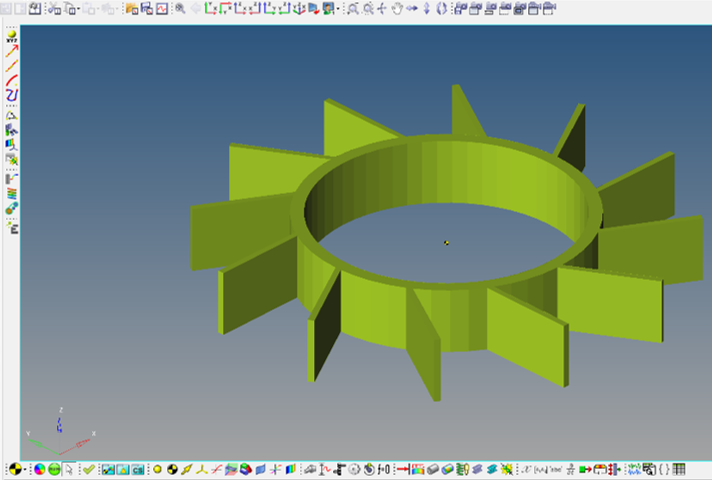
Figure 1. ホイール形状がインポートされた後のMotionViewでのモデル -
OriginのPointコレクターをダブルクリックし、に進んでcgを選択します。

Figure 2. Pointダイアログを選択し、ホイールボディのCGを選択 -
Project BrowserでSolver Gravityデータセットを選択し、Y方向のGravityを-9810に設定します。
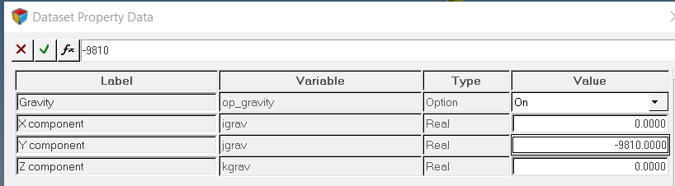
Figure 3. データセット - Solver Gravity
EDEMモデルのセットアップ
- バルク材料の定義
- 粒子の形状の定義
- 装置材料の定義
- 装置形状の定義
- 仮想形状 / 粒子ファクトリーの定義
- 環境パラメータの定義
- シミュレーションオプションの定義
-
Creatorツリーの下のセクションにあるShape LibraryからSingle Sphereを選択し、Physical Radius (m)を0.1に設定します。
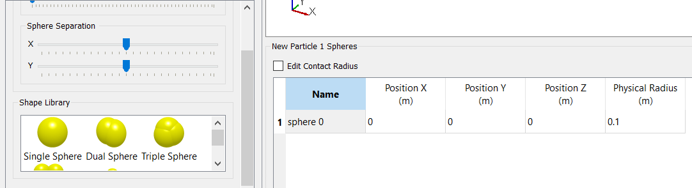
Figure 4. 粒子のShape Library- Optional:
粒子サイズの変更した場合、Viewパネルの
 を選択して粒子のビューをリセットすることが可能です。
を選択して粒子のビューをリセットすることが可能です。
- Optional:
粒子サイズの変更した場合、Viewパネルの
-
Solids density(
 )を7860に、Shear Modulus(G)を80.77e9に変更します。
)を7860に、Shear Modulus(G)を80.77e9に変更します。
-
上部のツールバーでStart Coupling Serverアイコンをクリックし、連成サーバーをオンにします。
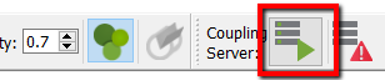
Figure 5. 連成サーバーをオンに -
MotionViewに戻り、Bulk Material InterfaceツールバーのEDEM Subsystemアイコン
 をクリックします。
をクリックします。
Figure 6. EDEM Subsystemツールバー -
インポートプロセスが完了したら、ツールバーのView選択内でドロップダウンメニューをクリックし、-Zビューを選んでズームインします。
Figure 7. ビュー選択グラフィック画面は下に示すように見えるはずです:
Figure 8. EDEMでのホイール形状Creatorツリー内のGeometriesの下にあるコンポーネントを注視します。ホイールの名称は'component_0000'です。Note: MotionSolveとインターフェースを擁するコンポーネントについては、その名称が'component_0000, component_0001'のようなルールに従っていなければなりません。次に、粒子ファクトリーの形状をセットアップします。 -
PhysicalのTypeをVirtualに設定します。
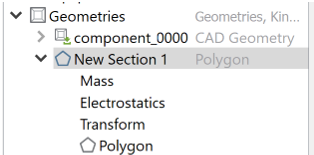
Figure 9. 粒子ファクトリーの多角形形状 -
'New Section 1'の下のTransformを選択し、下記のプロパティを設定します:
位置 回転 X 1.6 1.5708 Y 1.7 0 Z 0 0 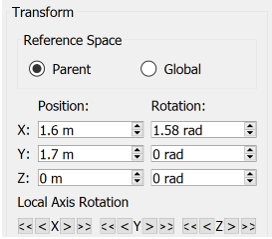
Figure 10. 多角形のセクションの変換 -
'New Section 1'の下のPolygonを選択し、下記のプロパティを設定します:
長さ Edge A 0.2 Edge B 0.2 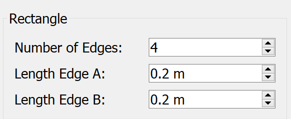
Figure 11. 多角形のプロパティ -
Positionでbccを設定します。
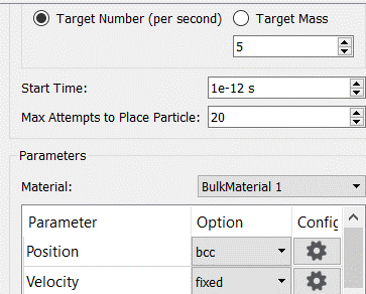
Figure 12. ファクトリーの追加 -
ギアのアイコン
 をクリックし、Position - Lattice Parametersダイアログを表示させます。
をクリックし、Position - Lattice Parametersダイアログを表示させます。
- Start Pointの下で、X、Yをそれぞれ1.6、1.7に設定します。
- 残りの欄はデフォルト値に設定されたままにします。
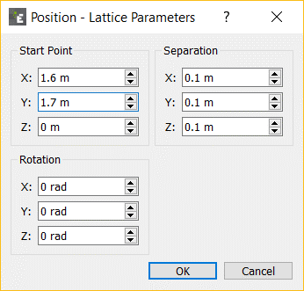
Figure 13. Position - Lattice Parameters -
Creator TreeでEnvironmentを選択し、Gravity – Y を-9.81に設定します。
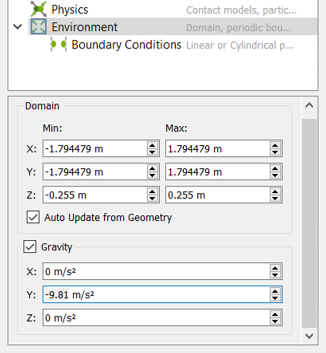
Figure 14. 重力の設定
EDEMでのシミュレーションのセットアップ
-
Simulatorに切り替えます。

Figure 15. ツールバー上のSimulatorアイコン -
Auto Time Stepチェックボックスの選択を解除し、Time Stepを1e-5に設定します。
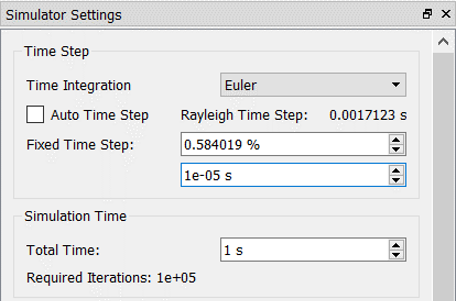
Figure 16. シミュレーターの設定 -
Estimate Cell Sizeをクリックし、与えられたセルサイズを受け入れます。
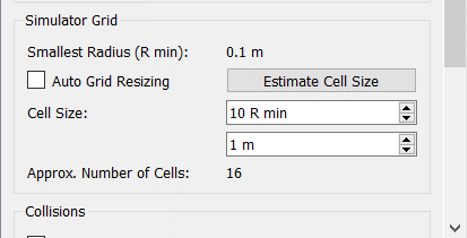
Figure 17. セルサイズの推定
EDEMシステムの作成
-
 でモデルを保存します。
でモデルを保存します。
シミュレーションの実行
-
Runパネル
 に移動します。
に移動します。
-
Runボタンをクリックし、シミュレーションを開始します
MotionSolveが起動され、EDEM側でもシミュレーションが始まります。シミュレーションプロセスは、EDEMでも見ることができます。
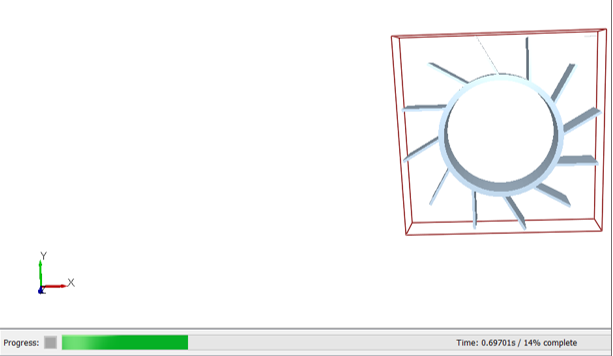
Figure 18. シミュレーション中のEDEMグラフィックスクリーン -
シミュレーションの進行に伴うグラフィックス表示の更新を行うには、EDEMで上部のツールバーからAuto updateをクリックします。

Figure 19. Auto update
ポスト処理
EDEMで相互作用するコンポーネントについて、EDEMでAnalystページからアニメーション表示することができます。
-
ツールバーのAnalystアイコンをクリックします。

Figure 20. ツールバー上のAnalystアイコン -
下部のツールバーでアニメーションをリセットします。

Figure 21. EDEMのAnimationバー -
Animate Forwardsアイコン
 をクリックします。
をクリックします。
-
 HyperViewでアニメーションを可視化します。
HyperViewでアニメーションを可視化します。
- MotionView RunパネルでAnimateをクリックし、MotionSolve H3D結果をHyperViewウィンドウに読み込みます。
- HyperViewで、Load ModelパネルのOverlayチェックボックスをアクティブにします。
- Open Modelファイルブラウザを使って、作業ディレクトリからmodel_edem.h3dを探して選択します。
- Applyをクリックします(ポップアップする警告メッセージにはYesと答えます)。
-
Start/Pause Animationボタン
 を使ってアニメーション表示します。
を使ってアニメーション表示します。
弾性体の連成
弾性体を使った連成シミュレーションの設定と実行は、前のステップで剛体を使った場合に行ったのと同じ手順で行います。
Note: 弾性体の相互作用を直接設定します。剛体の相互作用設定を最初に行う必要はありません。
対応するホイールの弾性体のH3Dファイルが用意されています。
-
弾性体には、以下のような特徴があります:
- ローターの要素には、材料特性としてSteelが割り当てられています。
- ブレードの要素には、Steelの10%の弾性係数と密度の材料特性を使用しています。
- 中心の節点は、剛体(RBE2要素)によってローター内面の節点と接続されています。
- 適切なモード表現のために、中心節点と各ブレード上の節点(任意)がインターフェース節点として選択されています。
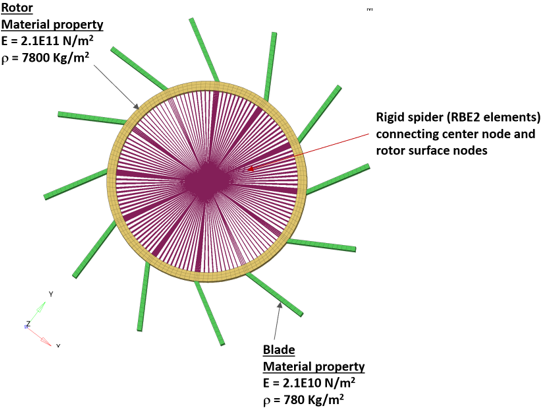
Figure 22. -
Simulator、
 をクリックします。Simulation TimeのTotal timeを5sに変更します(MotionView RunパネルのEnd
timeと一致させる)。
をクリックします。Simulation TimeのTotal timeを5sに変更します(MotionView RunパネルのEnd
timeと一致させる)。