弾性体データフロー
Nastranバルクデータファイルを生成するには、パーツをHyperMeshでメッシュ化します。バルクデータファイルを直接指定できるほか、他のFEコードで得られた入力ファイルをHyperMeshで変換することもできます。
バルクデータファイルをFlexbody Prepウィザードに読み取ると、OptiStructが自動的に起動して区分モード合成が実行されます。
- バルクデータファイル名
- フォース伝達節点のインデックス(結合点)
- モード合成タイプ(Craig-Bampton、Free-Free、Frequency Response、Craig-Chang)
変位、回転、応力テンソルおよびその他のデータについての結果のモード形状は、弾性体H3Dファイルに書き出されます。このファイルを使用して、HyperViewでモード形状や応力コンターをアニメーション表示できます。
MotionViewで機構を構築した後、個々のパートに関連付けるH3Dファイルを特定して関連付けることで、剛体パートを弾性体に切り替えることができます。モデル定義ファイルは、ソルバーニュートラルMDLファイルとして書き出されます。弾性パートについては、この時点で、選択されたモードリスト、およびパート毎の追加のセンサー節点インデックスを指定する必要があります。
動解析を実行すると、MotionViewによって、ソルバー入力ファイルと、弾性パートごとに1つの弾性体モーダルファイル(ADAMSのMTXファイルなど)が生成されます。これらのファイルを動解析ソルバーで使用できます。
ソルバーからの結果ファイルであるH3Dファイルおよびモデル定義ファイルは、弾性体機構のポスト処理に必要です。選択したタイプの動的応力、および応力に関係したインデックスは、マルチボディモーションアニメーション内に組み込まれたプロセスとして、コンタープロッティング用のポストプロセッサで自動的にリカバーされます。
結果の描画では、解析結果をHyperGraphに読み取ることができます。この読み取りでは、ASCII結果ファイルのデータレイアウトを記述したテンプレートファイルまたはバイナリファイル向けの外部リーダーを使用します。
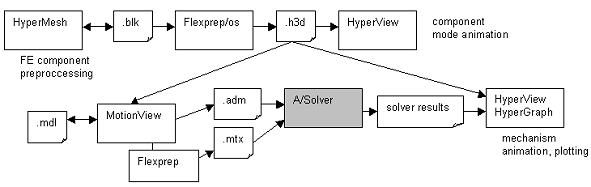
Figure 1. モード合成 -> 弾性体データフロー
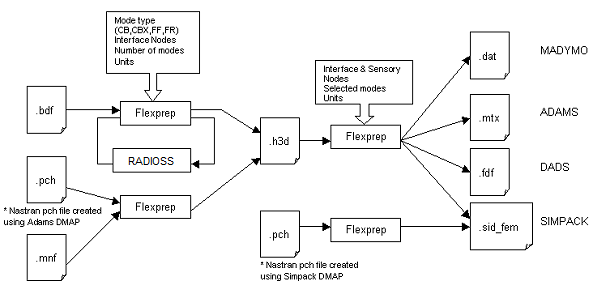
Figure 2.