Review Mass Summary
Review details about Mass, Center of Gravity (Cog) and Inertia of your model.
Tip:
- Manage the columns that are visible in the browser by right-clicking on a column header and selecting the columns to display.
- Turn the display of entities ON/OFF in the browser and graphics window using the Show, Hide, Isolate, and Reverse options available in the right-click context menu.
- Review only the selected entities, and make all other entities transparent using the Review option available in the right-click context menu.
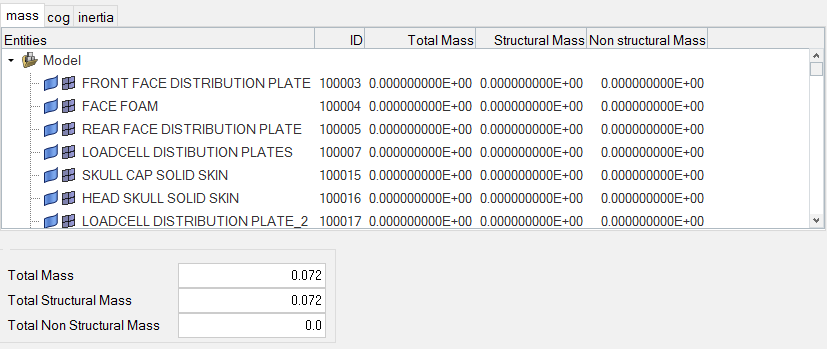
Figure 1. Summary of Mass
Supported Mass Values
Mass values supported in the Mass Summary dialog.
- Structural Mass
- Mass of the component defined by the mesh volume and material density.
- Non Structural Mass
- Mass added on the component, provided by following keywords:
- LS-DYNA
- *ELEMENT_MASS_PART
- Radioss
- /ADMAS defined on PART
- Lumped Mass
- Nodal distributed mass provided by following keywords:
- LS-DYNA
- *ELEMENT_MASS
- Radioss
- /ADMAS defined on NODES
- Mass in CNRB
- Constrained_Nodal_Rigid_Bodies
- LS-DYNA
- Total mass transferred to the *CONSTRAINED_NODAL_RIGID_BODYs in the model.
- Mass on RBODY
-
- Radioss
- Total mass transferred to the RBODYs in the model.
- Transferred Mass
- For each component, this is the nodal massed transferred to the rigid
bodies.
- LS-DYNA
- Deformable mass transferred to CONSTRAINED_NODAL_RIGID_BODY or to the rigid parts of a *CONSTRAINEED_EXTRA_NODES or to the rigid parts of *CONSTRAINED_RIGID_BODIES
- Radioss
- Deformable mass transferred to RBODY
- Distributed Mass
-
- LS-DYNA
- Mass in rigid components coming from free nodes linked by *CONSTRAINED_EXTRA_NODES
- Engineering Mass
-
- LS-DYNA
- Engineering Mass = Structural Mass + Non structural Mass + Lumped Mass + Distributed Mass
- Radioss
- Engineering Mass =Structural Mass + Non structural Mass + Lumped Mass
- Solver Part Mass
- Solver Part Mass = Engineering Mass + Transferred Mass
- Total Mass
- Total Mass = Solver Part Mass