MV-1070: Create a Simple Pendulum System Using MDL
In this tutorial, you will learn how to create a definition-based entity (such as a system) using MDL.
- Organize your model file modularly.
- Reuse system definition files.
- Easily debug and maintain your files.
- Create a library of modeling components.
- Perform certain operations on the entire system at once (for example; turning systems on/off, making the whole system compliant/rigid, translation, etc.). An operation, such as translation on a system, is automatically performed on all the subsystems within that system.
The concept of system definition is analogous to the procedures/subroutines in a programming language.
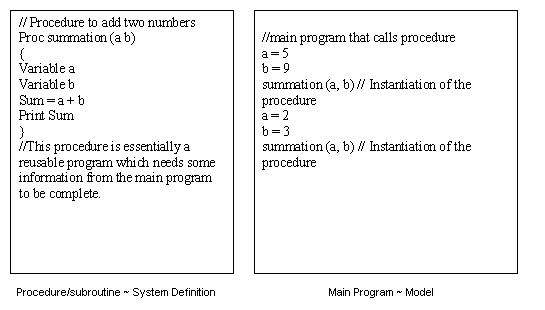
Figure 1.
- Analogy between programming and MDL approach
- A procedure is a program that needs information from the main program. The
procedure can be called /instantiated any number of times. A procedure is a
part of main program, but can be maintained separately.
Similarly, a system definition is a model aggregate which needs information from the main model. It can be called/instantiated any number of times. A system definition is a part of the main model which can be maintained separately.
Use of system definition is two-step process:- Defining the system
- Instantiation of the system definition in the model
- Section 1: System Definitions
- A system definition is a reusable system model that can be a part of any
model as long all the attachment requirements are satisfied.
A system definition is represented by a *DefineSystem() block. This block should end with a *EndDefine() statement that indicates the end of a definition block. All entities defined within this block are considered to be part of the system definition.
A typical system definition example is shown below:*DefineSystem(def_sys, att_1, att_2…att_n)In the system definition example above:def_sysis the variable name of the system definition and will be used while instantiating this system.att_1, att_2, … att_nis a list of arguments that act as attachments to the system.
A system definition can be created in two ways:- Using the text editor.
- Created from graphical user interface. This requires minimal text editing. Refer to MV-1030: Create a System Definition Using the MotionView GUI.
Note: This tutorial covers Method 1, as it covers all the details of the system definition. - Section 2: System Attachments
- The picture below shows a system definition of an SLA suspension. It is an
incomplete system which needs information about the attachment bodies and
points to get connected to.
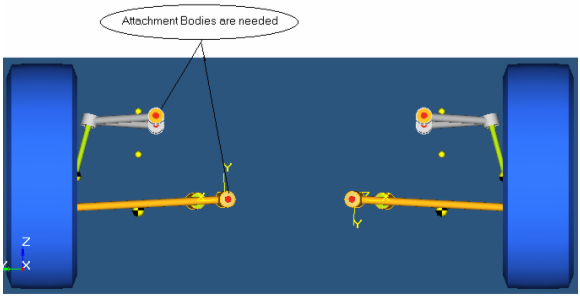
Figure 2.Excluding the *Attachment() statement, other entities in a system definition are similar to an MDL model file.
The general structure of a system definition is:- A system receives information about entities external to the system via attachments.
- Any MDL entity can be passed to a system as an attachment.
- The *Attachment() statement inside the system
definition declares the arguments in the
*DefineSystemblock as an attachment, along with assigning what type of entity the attachment is going to be. - The same variable name as the attachment should be referred within the definition when defining an entity that depends on the external entity.
- Refer to the entries in bold in the example below. Reference
line numbers are for reference only and are not part of the MDL
file.
- Line 2 - defines a system with a variable name
sys_definitionand has one argumentb_body_attas an attachment. - Line 4 - declares
b_body_attas an attachment with the entity type as Body. - Line 7 - creates a revolute joint between
b_sys_bodywhich is a body defined within this system (not shown) andb_body_attwhich is a body that is an attachment to this system.
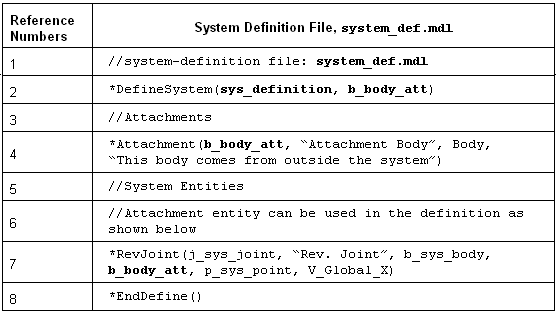
Figure 3.Note: An attachment entity need not serve as a physical attachment to entities inside the system definition. It may be used to represent external variables being passed into the system definition. For example, datasets may also serve as attachments. - Line 2 - defines a system with a variable name
- Section 3: Instantiating a System
-
- Instantiating a system means creating an instance of a system
definition. A system is instantiated using a
*System() MDL statement, which has the
following
syntax:
*System(varname, “label”, def_varname, arg_1, arg_2, …, arg_n)where,
varname- variable name of the system instance.label- descriptive label for the system.def_varname- variable name of the system definition being instantiated.arg_1, arg_2,…, arg_n- entity variable names that act as attachment to the system. The number of arguments should match the number of attachments listed and declared in the system definition.
- A definition can be instantiated multiple times. For example, a single system definition file for an SLA suspension can be used to create multiple SLA suspension systems within one or more vehicle model files.
- The following example illustrates a system definition and its
instantiation within an MDL model file. Some of the terms in the
example below are in bold to highlight a few key relationships
between a system definition and its instantiation. Reference
numbers are for the example only, and are not contained in an
MDL file.
- A system instance with variable name system1 is created
in line 2, that refers to the definition
sys_definition.B_Ground(Ground Body) which is passed as an argument for the attachment. - The system definition is described within the
*DefineSystem() and
*EndDefine() block between line 3
and line 7. Attachment
b_attgets resolved toB_Ground.
Reference Numbers System Instantiation with Definition 1 // Model : Body.mdl*BeginMDL(base_model, "Base Model")2 //Instantiate the system definition sys_definition*System(system1, "First System", sys_definition, B_Ground)3 //Begin System Definition Block*DefineSystem(sys_definition, b_att)4 //Declare a body attachment to the system*Attachment(b_att, "Body Attachment", Body, "Add an body external to this system5 //Entities within the system*Point(p_sys, "Point in the system")*Body(b_sys, "Body in the system")6 //Define a joint with the body b_sys and the body attachment b_att*RevJoint(j_rev, "Revolute Joint", b_sys, b_att, p_sys, VECTOR, V_Global_X7 *EndDefine() //End Definition Block8 *EndMDL() - A system instance with variable name system1 is created
in line 2, that refers to the definition
- Instantiating a system means creating an instance of a system
definition. A system is instantiated using a
*System() MDL statement, which has the
following
syntax:
- Manually author the MDL file as shown in the example above.
- Import a system from the System/Assembly panel in the MotionView MBD Model window.
- Use the Assembly Wizard in the MotionView MBD Model window.
The exercises that follow explain the first two methods; the third is covered in a separate tutorial.