SPH Symmetry Conditions
Multiple SPH Symmetry Conditions
An axi-symmetry condition can be modelized through the use of two conditions with respect to two planes intersecting at the axis of symmetry. A spheric symmetry condition can be modelized through the use of three conditions with respect to three planes intersecting at the center of symmetry.
Nevertheless, these kinds of symmetries are not treated the same way.
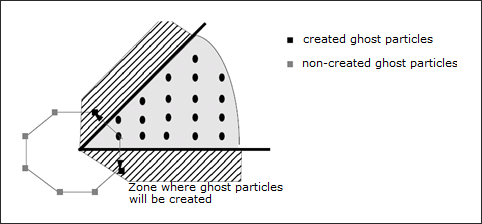
Figure 1. Incomplete Multiple Symmetries
Therefore, some characteristics of axi-symmetry (respectively spheric symmetry) conditions can be closed to the axis of symmetry (respectively the center of symmetry).
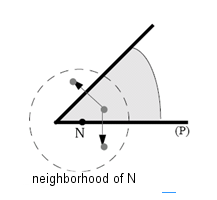
Figure 2. Neighborhood of Particle N is not Symmetric with Respect to Plane (P) and N's Normal Velocity to Plane (P) can be Non-zero
Kinematic Boundary Condition
With respect to the previous discussion: adding the kinematic boundary condition an explicit way allows to enforce it.
- If "Slide" type, the velocity of the node in direction "Dir" is set to zero
- If "Tied" type, the velocity of the node in all directions is set to zero
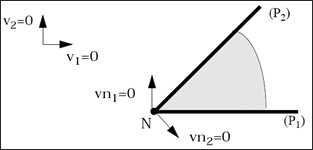
Figure 3. Combination of Kinematic Boundary Conditions from Different SPH Symmetry Conditions
Figure 3 indicates that if two kinematic boundary conditions are applied to N through two symmetry conditions with respect to planes (P1) and (P2), the two boundary conditions are modified so that the velocity in the plane normal to common axis of (P1) and (P2) will remain zero. Note that if one of the two symmetry conditions is a type "Tied" condition, the velocity of N in all directions is set to zero.
It also allows application to the same node, a kinematic boundary condition through a SPH symmetry condition (/SPHBCS) and a standard boundary condition (/BCS) at the same time, as long as the standard boundary condition is not given in a moving skew system, but a fix skew system or the global skew system. The two conditions are then composed the same way.
Part Mass
Where, mp is the mass specified into property set.
Ghost particles built from this particle will get the same initial volume and mass.
When , the previous equation may provide an error on mass and energies output for the part the particles belong to, with respect to the physical model.
Formulation Level
When a symmetry plane is defined, and even if a kinematic condition is set for all particles lying on the symmetry plane, particles lying at time zero inside the domain are theoretically able to cross the symmetry plane.
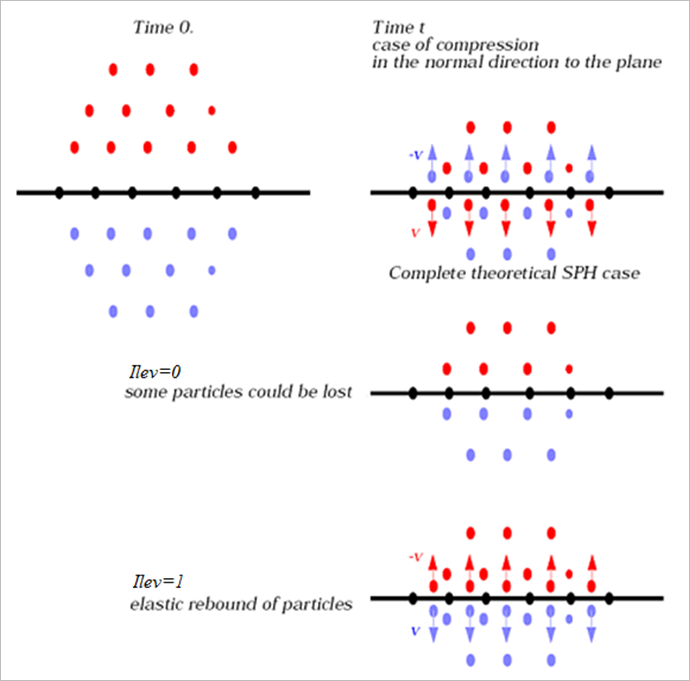
Figure 4. Formulation Level
If Ilev=0, particles crossing the symmetry plane will be (progressively) not taken into account anymore in the computation, neither than their symmetric particles which then lie inside the domain.
Maximum Created Number of Ghost Particles
Ghost particles are created at each search for neighbors time within the security distance, and then destroyed when a new search occurs (a new set of ghost particles is then created).
At any search time, all ghost particles which are inside the security distance of any real particle are created.
In practice, some more particles, strictly necessary, are created: a symmetric particle Gi to particle Ni is created, with respect to symmetry plane P, if neighbor of i:
With and are the smoothing lengths related to particle and .
As long as no real particles cross the symmetry plane (all real particles lie on the same side of the symmetry plane), this criteria is sufficient to get all ghost neighbors of all real particles inside the security distance, since:
for
And,
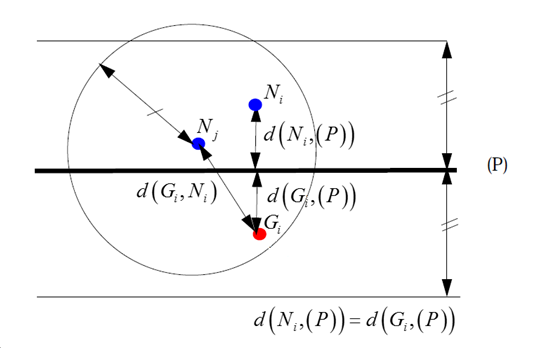
Figure 5. Ghost Particles to be Created
Particles, which one can expect to remain far from the symmetry plane all along the simulation, will never be symmetrized. This gives a way to over-estimate the number of particles which will be symmetrized at one time.
- Number of conditions
- Number of particles to be symmetrized with respect to condition
Anyway, the default value which is the number of SPH symmetry conditions multiplied by the number of particles will be enough to treat any problem.
Solid to SPH Options (Sol2SPH)
The solid to SPH option (Sol2SPH) enables you to turn a solid element into particles either in order to increase the time step/robustness of a Lagrangian calculation, while not changing the physics.
Time Step
- Particle time step (/DT/SPHCEL)
- Nodal time step (/DT/NODA)
- Smoothing length related to particle
- Sound speed at location
For time step scale factor , it is recommended to set it to 0.3.
- Mass for particles
- Stiffness based on SPH interaction
For time step scale factor , it is recommended to set it to 0.67.
Thermal Analysis
Heat transfer is now available between SPH particles and finite elements with Ithe=1 in /INTER/TYPE7 and /INTER/TYPE21; and with /THERM_STRESS/MAT, thermal expansion in SPH is also possible.