MV-7008: Co-simulation with AcuSolve
In this tutorial, you will learn how to setup a model in MotionView that will be coupled with AcuSolve.
With the addition of a co-simulation interface between MotionSolve and AcuSolve, you can now solve multi-physics problems that involve complex rigid body movement, coupled with fluid flow, that generates pressure forces on the rigid bodies. This capability lets you enhance the fidelity of your multi-body system, letting you generate more realistic results.
In this scenario, MotionSolve computes the displacements and rotations for the rigid bodies, while AcuSolve computes the forces and moments on those bodies. Both solvers exchange data with each other while stepping forward in time via the TCP socket protocol. This means that the two solvers can be located on different machines and on different platforms and still communicate with one another. For example, the CFD simulation can run on an HPC, while the MBS simulation can run locally on a laptop.
Tutorial Objectives
You will use the MotionSolve-AcuSolve co-simulation interface to couple the rigid body dynamics of a check valve within a pipe with the flow field. The AcuSolve model has already been setup for you and is located at <installation_directory>\tutorials\mv_hv_hg\mbd_modeling\motionsolve\cosimulation\Check_Valve_Coupled.acs. Steps for running this model in AcuSolve are included as part of this tutorial.
To learn more about how to setup the model in AcuSolve, please refer to <installation_directory>\acusolve\<platform>\help\acu\acusolve_tut\Tutorials\Check_Valve_Coupled\.
Software Requirements
| Machine A | Machine B | ||
|---|---|---|---|
| Software | Platform | Software | Platform |
| MotionSolve/MotionView | Windows 64-bit or Linux 64-bit | AcuSolve | Windows 64-bit or Linux 64-bit |
From the table above, the co-simulation is supported for both Windows and Linux platforms (64-bit). Cross platform co-simulation is also possible.
Simulation Environment
- Establishing a connection to both MotionSolve and AcuSolve.
- Communicating the displacements and rotations from MotionSolve to AcuSolve.
- Communicating the forces and moments from AcuSolve to MotionSolve.
- Managing runtime and licensing.
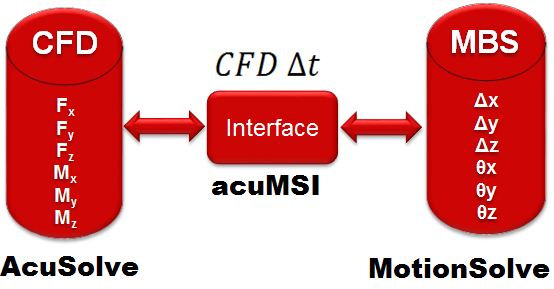
Figure 1. Co-Simulation setup
Pipe with a check valve
A check valve is a mechanical device that permits fluid to flow in only one direction. This is controlled by a shutter body. Fluid flowing in one direction pushes the shutter body in one direction, thereby opening the valve. Fluid flowing in the opposite direction pushes the shutter body in the other direction, which causes the valve to shut and prevents flow reversal in the pipe. Check valves are found in pumps, chemical and power plants, dump lines, irrigation sprinklers, hydraulic jacks, for example.
- A pipe with an inlet and outlet for the fluid flow.
- A check valve assembly that consists of a shutter plate attached to a stem.
- A stop mounted on a perforated plate downstream of the shutter body.
- The fluid flow in the pipe is assumed to be axisymmetric. This allows you to model only a part of the check valve. In this example, a 30 degree section of the geometry is modeled, as shown by the blue part in the figure below. The advantage of doing this is a reduced simulation time while still capturing an accurate solution.
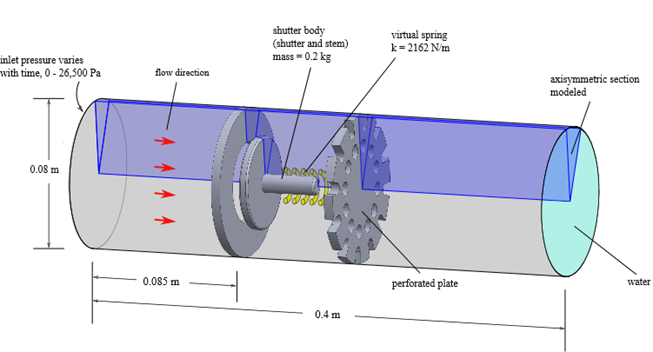
Figure 2. Pipe with check valve model setup
The check valve assembly consists of a disc-like body mounted on a stem. When fluid flows in the direction specified by the red arrows in the figure above, the fluid forces the shutter body to translate in the same direction as the fluid. The motion of the shutter body is also affected by a spring damper attached between the shutter body and the perforated plate. Finally, 3D rigid body contact is modeled between the shutter body and the stop to arrest the motion of the shutter body in the direction of the flow.
For the MBS model, only 1/12 of the shutter body and the perforated plate are modeled.
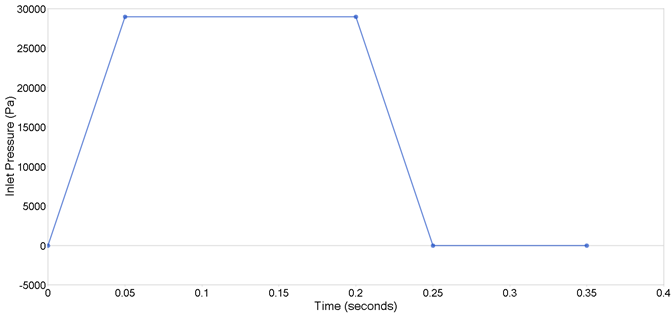
Figure 3. Inlet pressure
This dynamics of this kind of model can be termed as being “tightly” coupled between the two solvers. This means that the motion of the rigid bodies affects the fluid flow field, which in turn affects the rigid body motion in a cyclical fashion.
The rest of this tutorial assumes that this model has been correctly setup in AcuSolve. Note that the model is designed to translate the shutter body until it collides with the perforated plate. The MotionView model has been designed with a contact between these two bodies that causes the shutter body to rebound appropriately. To allow the rigid bodies to come into contact without the AcuSolve finite element mesh fully collapsing, the perforated plate in the fluid model has been offset by 0.002m in the positive X direction. This allows the MotionView model to react as specified by the contact entity while keeping the AcuSolve mesh from fully collapsing.
Load the Model in MotionView
-
Open the model Valve_model.mdl from
<altair>\<version>\tutorials\mv_hv_hg\mbd_modeling\motionsolve\cosimulation.
This model is prepared to run in MotionSolve but requires modifications to run in co-simulation with AcuSolve. These steps are outlined below.Once the model is loaded into MotionView, the graphical window displays the shutter valve, perforated plate, joint and spring entities, as well as a graphical representation of the spring damper as shown in the figure below.
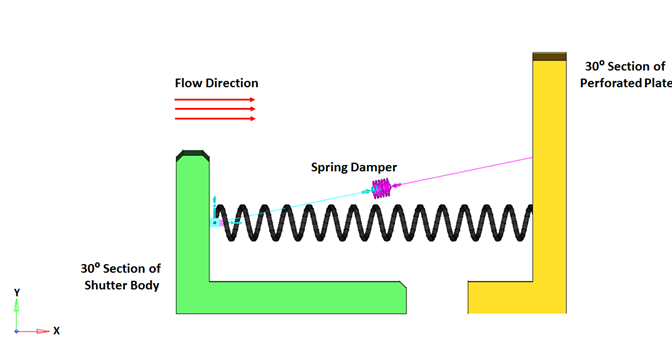
Figure 4. The MotionSolve model of the pressure check valveThe MotionSolve model consists of the following components:Component Name Component Type Description Ground Body Rigid Body Ground Body Shutter Body Rigid Body 30 degree section of the shutter body. Perforated Body Rigid Body 30 degree section of the perforated plate. Contact 3D Rigid-Rigid Contact Force 3D rigid-rigid contact force between the Shutter body and the Perforated Body. Solver Units Data Set The units for this model (Newton, Meter, Kilogram and Second). Gravity Data Set Gravity specified for this model. The gravity is turned on and acts in the negative Y direction. Shutter Body Graphic Graphic The graphic that represents the shutter body. This graphic is used both for the co-simulation and for the contact force calculations. Perforated Plate Graphic Graphic The graphic that represents the perforated plate body. This graphic is used both for the co-simulation and for the contact force calculations. Spring Graphic The graphic that represents the spring modeled between the shutter body and the perforated plate body. This is only for visualization and does not affect the co-simulation results. Fixed Fixed Joint This fixed joint clamps the perforated plate body to the ground. Translation Translational Joint This translational joint allows motion of the shutter body along the X axis. Spring Spring Damper This is a simple spring damper mounted between the shutter body and the perforated plate body. ContactOutput Output An output signal that measures the contact force. Displacement Output An output signal that measures the displacement between the shutter body and the ground. Velocity Output An output signal that measures the velocity of the shutter body with respect to the ground.
Specify the “Wet” Body That Will Interact with AcuSolve
To couple with AcuSolve, you need to specify one or more "wet" bodies. A "wet" body is a body in the MotionSolve model which interacts with the fluid flow and thus has forces and moments acting on it. Such a body can translate or rotate due to the actuating fluid force/moment as computed by AcuSolve as well as due to any actuating forces/moments in the MotionSolve model. In this example, we will define a single "wet" body – the shutter body that translates along the X axis due to fluid impinging on it.
To specify a body as "wet" in MotionView, you have to make use of a system definition, which is described below.
-
From the Import/Export tab, select Import and click the
File open icon,
 .
.
-
Leave the labels as-is and click OK.
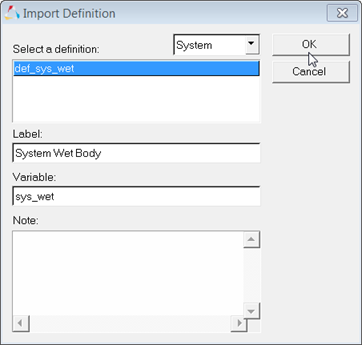
Figure 5. Adding the system definition to the modelA new system called System Wet Body is created in your model.
-
Specify the "wet" body by clicking the newly created System Wet Body and
clicking the Attachments tab as shown in the figure
below.

Figure 6. Defining the rigid body associated with the “wet” body
Run the Model without Co-simulating with AcuSolve
To make sure that the MotionView model is setup correctly, run the model in MotionSolve and make sure there are no warning/error messages from MotionSolve.
-
To deactivate the template Define co-simulation with AcuSolve shown in the figure below,
right-click on it in the browser and select
Deactivate.
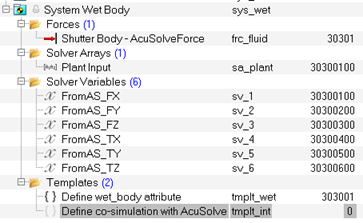
Figure 7. Deactivate the co-simulation templateBy doing this, you are deactivating the flag which tells MotionSolve that this model is intended for co-simulation with AcuSolve. Thus, MotionSolve simulates this model as a stand-alone model without co-simulating with AcuSolve
You may run this model using the Run panel in MotionView and ensure that there are no error or warning messages reported. This is recommended to ensure that the model works properly before attempting a co-simulation.
If you load the animation H3D generated from running this model, you will see that there is no motion in any of the parts. This is because all of the actuation for this model comes from AcuSolve, which was disabled for this simulation.
-
After you have verified the model, re-activate the template Define
co-simulation with AcuSolve to
perform a co-simulation, as shown in the figure below:
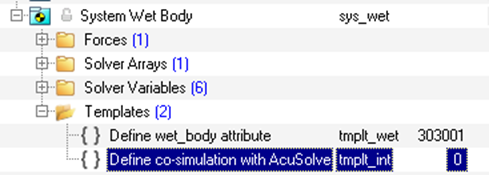
Figure 8. Activate the co-simulation template -
To export the model to your working directory, click the Export to
Solver button and export the solver deck to your working
directory.
You may change the default name of the model.
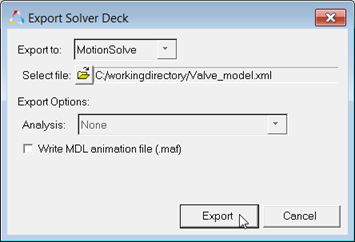
Figure 9. Exporting the model to .xml
Verify the Model between MotionSolve and AcuSolve
To successfully run the co-simulation, the model created in MotionView and the model created in AcuSolve must be consistent. The following criteria need to be met in order for the two models to be consistent.
-
Also, verify that the end times for both models are set to the same values. For
this tutorial, the end times for both the AcuSolve
and MotionSolve models are set to 0.35s.
See the Run Panel in MotionView to set the print_interval, step size (h_max), and end times.Note that the units in the MotionSolve and AcuSolve models do not need to match to run the co-simulation; however, the units must match to overlay the results animations in HyperView. The units in MotionView are set via the Units form shown below:
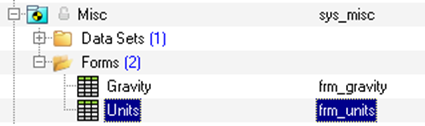
Figure 10. Setting the units in MotionViewAll values in the MotionSolve model are set with respect to these units settings.
Run the MotionSolve and Middleware Executables for Co-simulation from the Compute Console
-
From the Start menu, select and select MotionSolve as the
solver.
Locate the model you just exported by clicking on the file open icon.
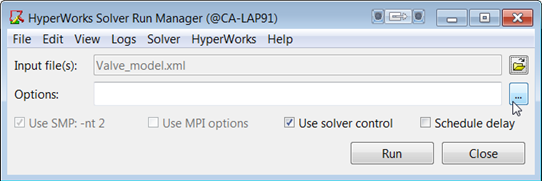
Figure 11. Select the exported model from disk -
Click the ellipsis button next to the Options field to
open the Available Options dialog.
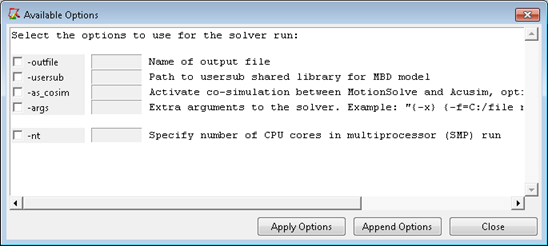
Figure 12. Selecting the co-simulation flag -
Activate the –as_cosim option. When this flag is enabled, it
tells the Run Manager to do the following:
- Invoke the MotionSolve executable and run the model that is specified.
- Invoke the middleware “acuMSI”, which enables communication between MotionSolve and AcuSolve.
When you activate this option, the following dialog is displayed and you are prompted for additional options:
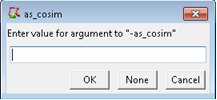
Figure 13. Specifying options for the co-simulationYou may specify the following options here:- acuMSI Options
- -aport <integer>
-
Specifies the communication port number for communication between AcuSolve and acuMSI. The default is 48000.
Note If you need to change the default port for communication between AcuSolve and acuMSI, in addition to changing this argument, you also have to specify the changed port number in the AcuSolve input file.
- -mport <integer>
-
Specifies the communication port number for communication between MotionSolve and acuMSI. The default is 94043.
Note: If you need to change the default port for communication between MotionSolve and acuMSI, in addition to changing this argument, you also have to specify the changed port number in an environment variable MS_AS_PORT. MotionSolve checks for this environment variable at the start of the simulation and changes its listening port accordingly. - -mi <integer>
- Specifies the maximum number of iterations per time step between the two solvers. The default is 0.
- -v <integer>
- Specifies the verbosity level of the output file from acuMSI. The default is set to 0 (verbosity OFF).
-
Click Apply Options and click
Close.
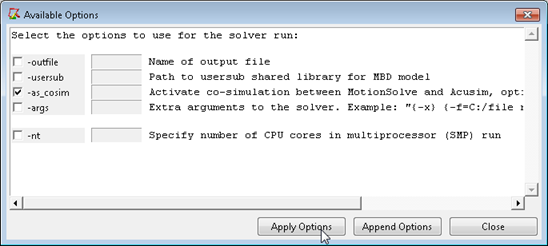
Figure 14. Specifying the co-simulation flag -
You are now setup to start the co-simulation on the MotionSolve side. Click Run.
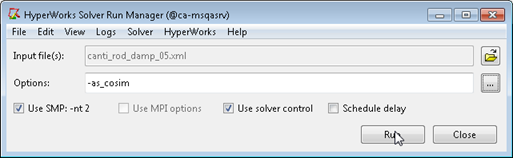
Figure 15. Run the MotionSolve modelThis launches MotionSolve as well as the acuMSI executable. The MotionSolve run is paused at the first time step – it is now in waiting mode and the co-simulation will start as soon as AcuSolve is run.
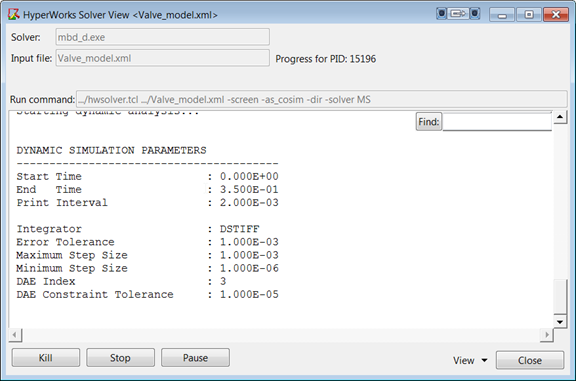
Figure 16. The MotionSolve simulation is waiting for a connection to AcuSolve
Run the AcuSolve Executable for Co-simulation
-
From the Start menu, select . In the window that is displayed, change the field
Problem name as specified by the AcuSolve .inp file. Make sure your
Problem directory is set to your current working directory.
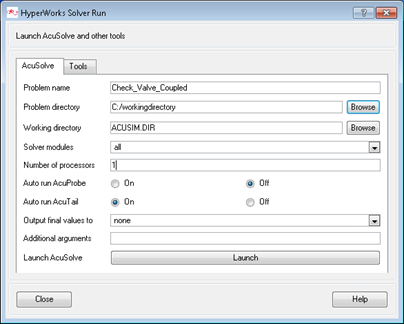
Figure 17. Launching AcuSolve for the co-simulationFor this model, the default values are used. AcuSolve runs using a single processor, and AcuConsole generates the input files and launches AcuSolve.
Post-process the Results from the Co-simulation
HyperView and HyperGraph can be used to post process the co-simulation results within the HyperWorks Desktop environment.
To launch HyperView (HyperGraph), from the Start menu, select .
The animation H3D generated by the MotionSolve part of the co-simulation contains only the results from MotionSolve. Similarly, the result files from AcuSolve only contain the results for the AcuSolve model. To animate the results from the co-simulation, follow these steps:
-
Load the animation H3D generated by MotionSolve in
HyperView.
-
Click the file open button, , next to Load model and navigate to the results
directory (the same directory where the .xml file
is located).
-
Click Apply.

Figure 18. Loading MotionSolve H3D in HyperView
-
Click the file open button,
-
Using AcuTrans, overlay the newly-created H3D over
the MotionSolve result H3D in HyperView. This is accomplished by repeating Step 1
described above and activating Overlay when selecting the
AcuSolve result H3D.

Figure 19. Overlaying AcuSolve H3D over the MotionSolve H3D in HyperViewOnce loaded, the graphical window contains both results and can be animated as before. To visualize the information contained within the AcuSolve results, a Contour plot may be used. Click on the Contour button to display the panel.
-
Set the options as shown in the figure below and click
Apply.
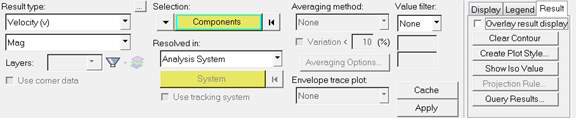
Figure 20. Overlaying AcuSolve H3D over the MotionSolve H3D in HyperViewThis creates a contour plot of the velocity magnitude overlaid with the results from MotionSolve in one window.
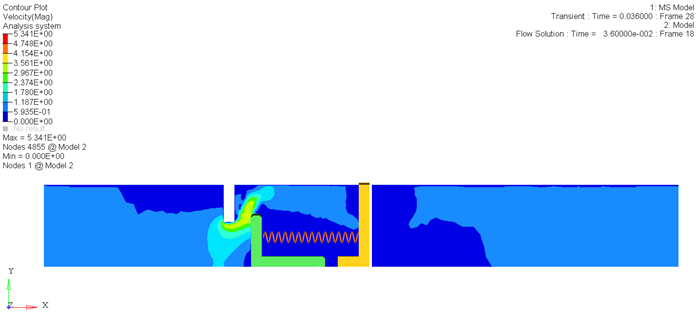
Figure 21. Velocity magnitude plot overlaid with the MotionSolve results in HyperView
Plotting the MotionSolve Results in HyperGraph
You can also interpret the results with a two dimensional plot using HyperGraph. HyperWorks Desktop can be used in a multi-window layout, allowing both HyperView and HyperGraph to be open at the same time.
-
From the toolbar, click the Page Window Layout button
and split the page into two vertical pages.
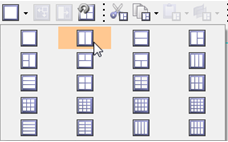
Figure 22. Splitting the page into two vertical pagesThis automatically adjusts the graphical window to accommodate two pages, defaulting to two instances of HyperView.
-
Perform the following selections:
- Under Y Type, select Displacement.
- Under Y Request, select Displacement (on Shutter Body).
- Under Y Component, select X.
- Click Apply.
HyperGraph can be used to create additional traces on the same plot to generate the following plots.
Figure 23. Select the signals for plotting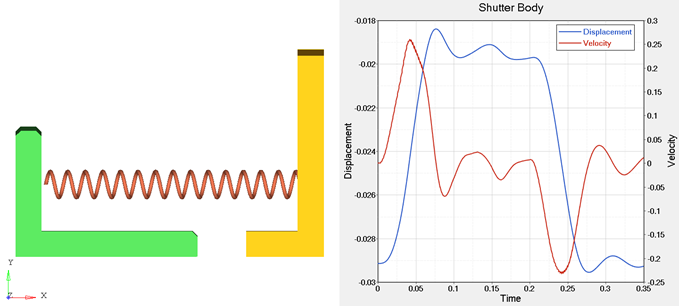
Figure 24.