MV-1010: 3D Mesh-to-Mesh Contact Simulation
In this tutorial, you will learn about 3D rigid body contact capabilities in MotionSolve and use the mesh-to-mesh contact approach, which uses surface meshes for the bodies in contact during the simulation.
A surface mesh is an interconnected set of triangles that accurately represent the surface of a 3D rigid body. MotionSolve prescribes certain conditions for such a surface mesh.
- Each component mesh should form a closed volume. This means that the given mesh should not contain any open edges (edge which is part of only one element) or T- connections (2 elements joined at the common edge in the form of a T).
- Mesh should be of uniform size.
- Element surface normal should point in the direction of expected contact.
- Import CAD geometry with graphic settings suitable for contact simulation.
- Setup 3D rigid body contact between meshed geometries in the multibody model.
- Perform a transient analysis to calculate the contact forces between these geometries.
- Post-process the results using a report generated automatically.
For this tutorial, you will use a slotted link model.
For this type of meshed representation of 3D rigid bodies, MotionSolve uses a numerical collision engine that detects penetration between two or more surface meshes and subsequently calculates the penetration depth(s) and the contact force(s).
There are numerous 3D contact applications (gears, cams, mechanisms with parts in contact, and so on) that may be solved using this approach.
Slotted Link Model
A slotted link mechanism (sometimes also referred to as a scotch-yoke mechanism) is a type of mechanism used to convert an input rotational motion into continuous or intermittent translational motion of a sliding link or yoke part. The motion is transferred via a contact force between parts of the mechanism that are in contact. Both normal and friction contact force may be responsible for the transfer of motion.
Such mechanisms find common application in valve actuators, air compressors, certain reciprocating and rotary engines, among others. The figure below illustrates a slotted link mechanism that will be modeled in this tutorial.
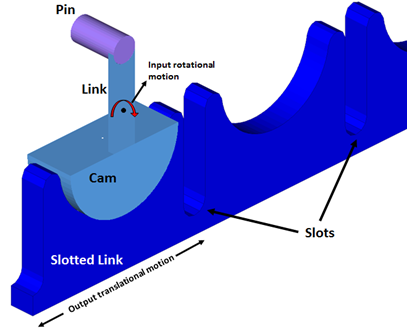
Figure 1. A Slotted Link Mechanism. The cam is in contact with the slotted link as shown, whereas the pin comes into contact with the slots.
Import CAD Geometry into MotionView
-
Set the following options in the dialog:
-
Click the file browser icon,
 , to navigate to your working directory and
select slotted_link.x_t as the input CAD
geometry.
The Output Graphic File text field is automatically populated with the same path and name, however it is suffixed with a _graphic.h3d extension. This file will be used to specify the graphics in the model. You may change the name or path of the graphic H3D if you prefer.
, to navigate to your working directory and
select slotted_link.x_t as the input CAD
geometry.
The Output Graphic File text field is automatically populated with the same path and name, however it is suffixed with a _graphic.h3d extension. This file will be used to specify the graphics in the model. You may change the name or path of the graphic H3D if you prefer. -
Click
 to expand the Meshing
Options for Surface Data section. Select Allow HyperMesh to specify mesh
options.
to expand the Meshing
Options for Surface Data section. Select Allow HyperMesh to specify mesh
options.
-
Activate the Control mesh coarseness for
contacts check box. Set the slider to
5.
Selecting this option instructs HyperMesh to mesh the CAD geometry so it can be used for 3D contact in MotionSolve.Note: The slider controls the coarseness of the generated mesh, with 1 being the coarsest and 10 being the finest. A very coarse mesh has large triangles, which may not represent the curvature of the CAD surfaces accurately. Alternatively, a very fine mesh has extremely small triangles that may increase element numbers and thereby the solution time. The best practice is to strike a balance between mesh fineness and performance that satisfies the modeling purpose.At this stage, the Import CAD or FE using HyperMesh dialog should look like the figure below:
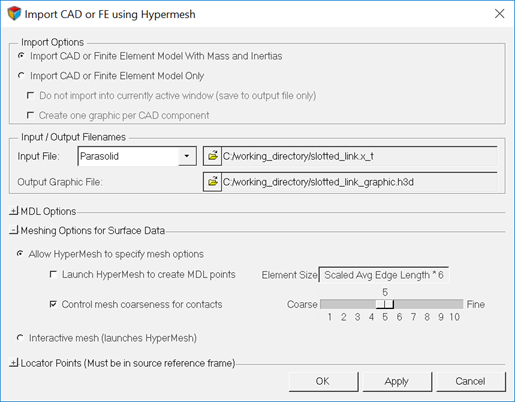
Figure 2. Importing CAD or FE using HyperMesh
-
Click the file browser icon,
- Click OK.
MotionView invokes HyperMesh in the background to mesh the geometry and calculate its volume properties. The Import CAD dialog is displayed. From this dialog, you can review the components in the CAD file as well as their mass, density, and volume properties.
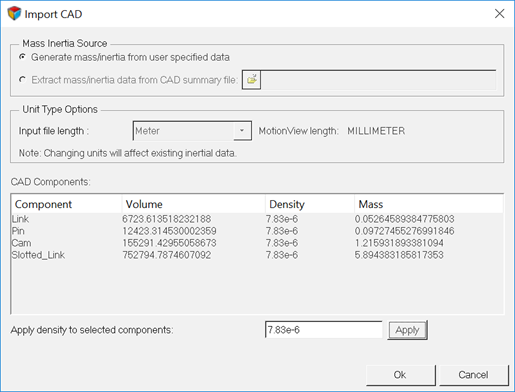
Figure 3. Importing CAD Using the Import CAD or FE Utility -
From the Visualization toolbar, click Graphic Entity
Attributes,
 .
The Graphic Entity Attributes panel is displayed.
.
The Graphic Entity Attributes panel is displayed. -
From the Graphic list on the left side of the panel, click
Model to select all graphics, then click
Mesh lines,
 .
.
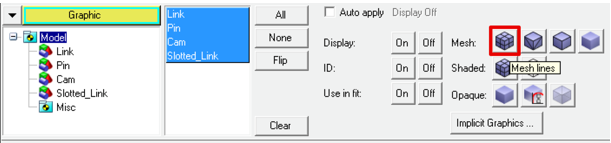
Figure 4. Displaying Mesh Lines for all Components of the Input CAD Geometry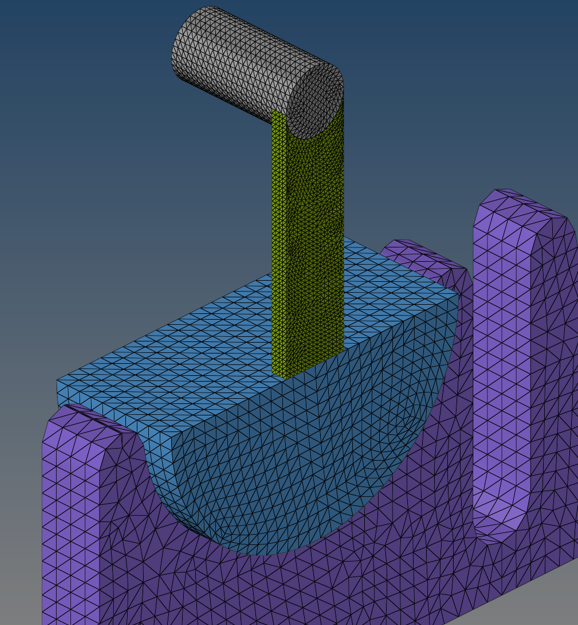
Figure 5. Displaying the Surface Mesh for all Components of the Input CAD Geometry
Create Joints and Motion
At this stage, the model contains the following bodies along with their associated graphics:
| Entity name | Entity type | Description |
|---|---|---|
| Slotted_Link | Rigid Body | The slotted link body. |
| Cam | Rigid Body | The cam body. |
| Pin | Rigid Body | The pin body. Together the cam and the pin bodies engage the slotted link. |
| Link | Rigid Body | A connector body between the pin and the cam. |
| Slotted_Link | Graphic | The graphic that represents the slotted link body. This is a tessellated graphic. |
| Cam | Graphic | The graphic that represents the cam body. This is a tessellated graphic. |
| Pin | Graphic | The graphic that represents the pin body. This is a tessellated graphic. |
| Link | Graphic | The graphics that represent the link body. This is a tessellated graphic. |
The Pin, Link, and Cam bodies are fixed to each other and pivoted to the Ground Body at the Cam center. The Slotted_Link can translate with respect to the Ground Body.
-
Create joints,
 , per the details in the table below:
, per the details in the table below:
S.No Label Type Body 1 Body 2 Origin Alignment Axis 1 Pin Link Fix Fixed Joint Pin Link Pin CG 2 Link Cam Fix Fixed Joint Link Cam Link CG 3 Cam Pivot Revolute Joint Cam Ground Body Global Origin Global Y 4 Slotted Link Slider Translation Joint Slotted_Link Ground Body Slotted_Link CG Global X -
Apply a motion,
 , on the Cam Pivot joint of the type
Displacement and define the Expression as
`360d*TIME`.
, on the Cam Pivot joint of the type
Displacement and define the Expression as
`360d*TIME`.
Define Contact Between the Colliding Geometries
- Cam and the Slotted_Link
- Pin and the Slotted_Link
-
From the Force Entity toolbar, right-click on the Contact icon,
 .
The Add Contact dialog is displayed.
.
The Add Contact dialog is displayed. -
For the Label, enter Cam Slotted Link Contact. Select
3D Rigid To Rigid Contact and click
OK.
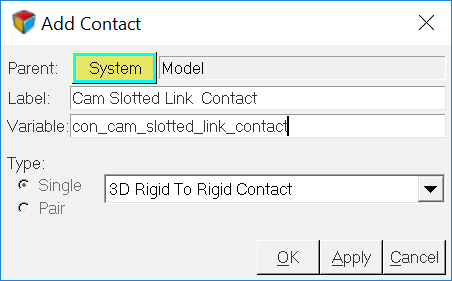
Figure 6. -
From the Connectivity tab of the Contact panel, resolve Body I to
Cam and Body J to
Slotted_Link. This automatically selects the respective
graphics that are attached to these bodies.

Figure 7. -
Activate the Highlight contact side check box. This
colors the geometries specified for this contact force element according to the
direction of the surface normals. Verify that both geometries are completely red
(to visualize clearly, you may have to deactivate the other graphic and
reactivate).
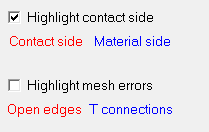
Figure 8.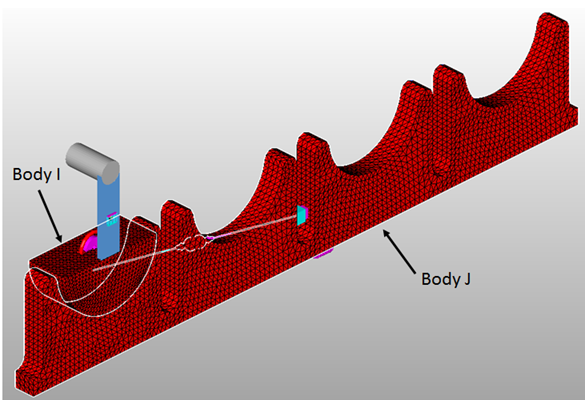
Figure 9. Check for Incorrect Surface NormalsThe color red indicates the direction of the surface normal and is the side of the expected contact.
-
Check for open edges or T-connections. If the associated graphics mesh has any
open edges or T-connections, the Highlight mesh errors option is active. If it
is active, check the box for Highlight mesh errors.
Any open edges or T-connections in the geometry are highlighted.The graphics associated in this contact entity do not have any mesh errors. Therefore, No mesh errors is displayed and grayed out.
Figure 10.The geometry is clean; there are no free edges or T-connections in the model.
Note: For every contact entity added to the model, MotionView automatically creates an output, , of the type Expression that can be used to plot
the contact forces for that contact element.
, of the type Expression that can be used to plot
the contact forces for that contact element. -
Specify the contact properties. Click the Properties tab
to display the Normal Force and the Friction Force property sub-tabs within the
Contact panel. In this model, you will use an Impact model with the following
properties:
- Normal Force Model
- Impact
- Stiffness
- 1000.0
- Exponent
- 2.1
- Damping
- 0.1
- Penetration Depth
- 0.1
- Friction Force Model
- Disabled
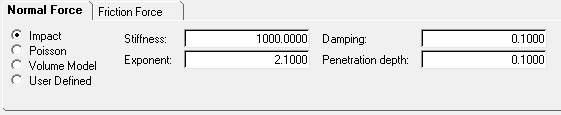
Figure 11. Contact Panel - Properties tabNote: MotionSolve supports several contact methodologies. A more detailed description on each method and their properties can be found at Force: Contact. -
Change the location where contact forces are applied to a surface mesh.
- Select the Advanced tab.
- From the Force Computed at drop-down menu, select Nodes.

Figure 12.Note: By default, contact forces are resolved at the center of each element of the surface mesh. This setting is satisfactory in most contact applications. However, you can force MotionSolve to apply the contact forces on the nodes of the surface mesh instead. This is useful in cases where a geometric edge is in contact but comes with a slight penalty in computational performance. -
For the contact force element Pin Slotted Link Contact, find the precise time
at which contact first occurs between the two colliding bodies.
-
In the text field below, enter 0.01.

Figure 13. Contact Panel - Advanced TabNote: With the Find precise contact event option, MotionView automatically adds a sensor entity (defined by Sensor_Event in the solver deck), which has a zero_crossing attribute. During simulation, when the contact force is detected for the first time (force value crossing zero), MotionSolve reduces its step size by the given factor and attempts to determine the contact event more precisely.
-
In the text field below, enter 0.01.
Set Up a Transient Simulation and Run the Model
At this point, you are ready to set up a transient analysis for this model.
-
From the toolbar, click Run,
 , to open the Run panel.
, to open the Run panel.
-
To obtain accurate results, specify a smaller step size than the default.
-
Click Close.
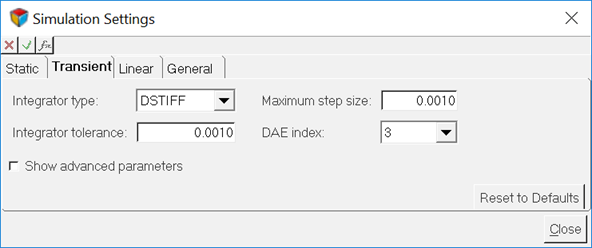
Figure 14. Specifying the Maximum Step Size
-
Click Close.
-
From the Run panel, specify a name for your XML model and click
Run.
The transient simulation is started.

Figure 15. Specify the Output File Name and Run the ModelThe HyperWorks Solver View dialog displays a message from the solver that confirms that the mesh-based contact method is being used for the contact calculations.
Figure 16. Verifying Mesh-Based Contact is Used for the SimulationThe log file contains messages related to the sensor. This is a result of finding the precise contact event for the second contact element in the model.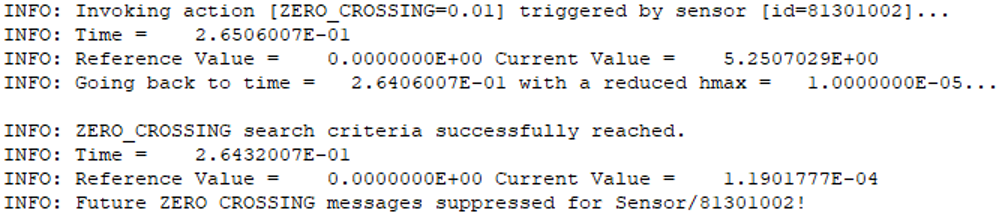
Figure 17. Solver Message Related to Sensor Activity
Post-process the Results
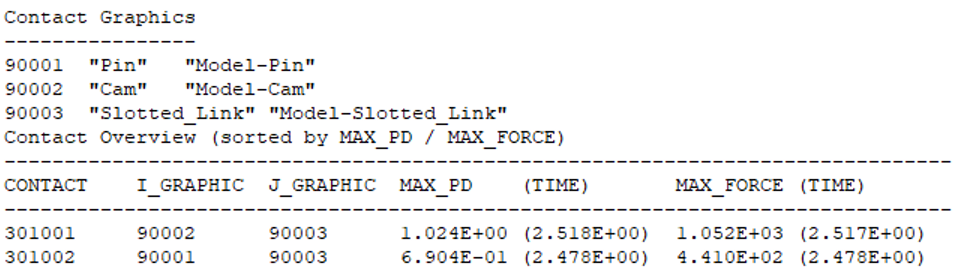
Figure 18. Contact Overview Table
-
To view a consolidated report of the results, click .
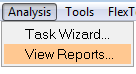
Figure 19.A list of previous simulations you have completed using MotionView is displayed. - Click OK.
Figure 20. Create Contact ReportMotionView creates several pages in your current HyperWorks session.
Visualize the Contact Forces via H3D
The first HyperView page (second in the session) displays a vector animation of contact force aggregated over the contact region. You may hide one or more parts to view this clearly in the modeling window. This is illustrated in the figure below.
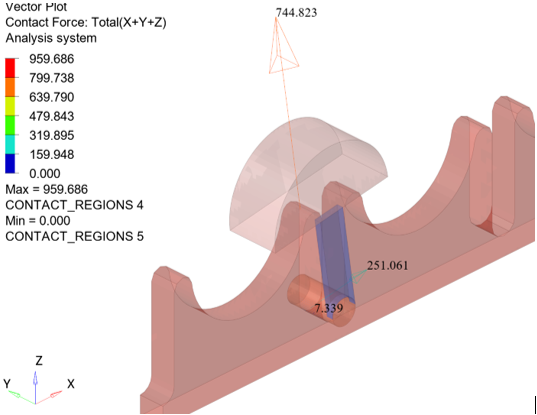
Figure 21. The contact force vector at the contacting regions
Contact Summary
Use the Page Navigation icon, ![]() , to navigate to the next page.
, to navigate to the next page.
The third page in the session can be used to get an overall summary of the contact simulation. This page contains table that tabulates the summary, as well as a HyperView window that displays the penetration for the entire simulation. The table provides a summary of the maximum penetration depth and maximum force. This page provides a bird’s eye view of the contact phenomenon happening within the model. The contour of penetration depth is a static image that highlights all regions that come under contact during the entire period of the simulation.
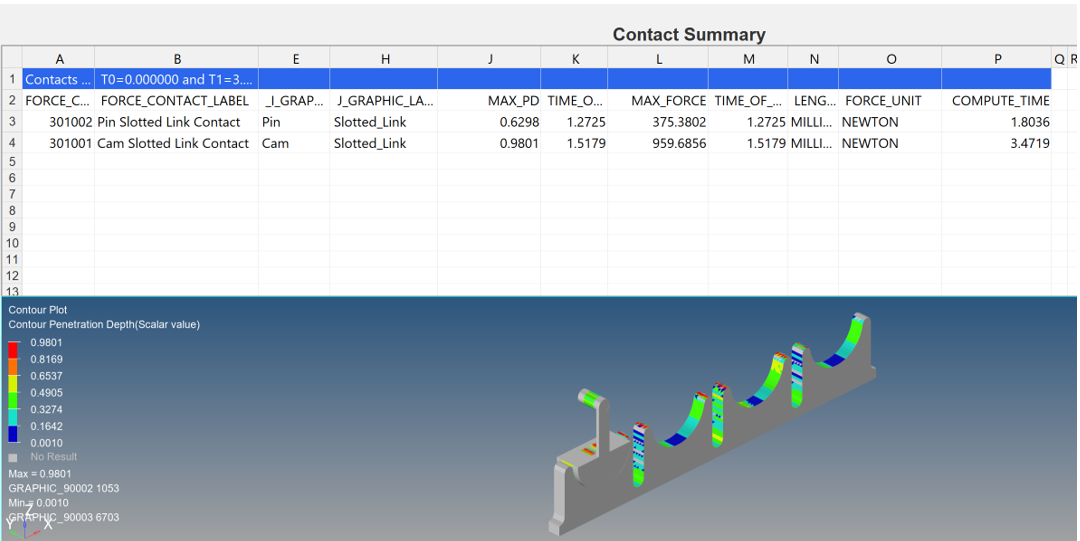
Figure 22. Contact summary page
Visualize the Penetration Depth via H3D
Navigate to the next page.
The fourth page in the session can be used to visualize the penetration depth over the course of the simulation.
-
Set the graphic display to Transparent Elements and Feature
Lines.
Figure 23. Set Display to Transparent Elements and Feature Lines -
Click the Start/Pause Animation icon,
 , to animate the result.
The animation is shown in the figure below:
, to animate the result.
The animation is shown in the figure below: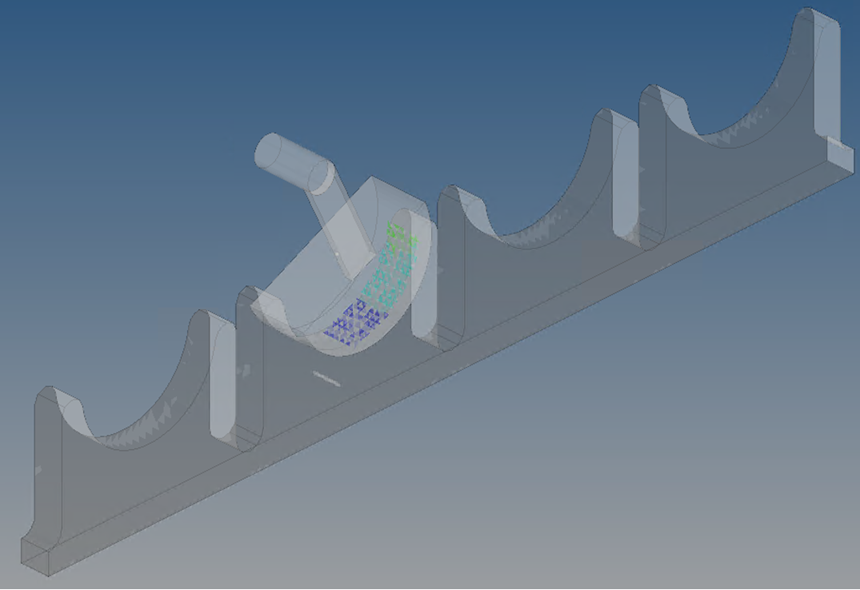
Figure 24. Penetration between the Cam Body and the Slotted Link
Visualize MotionSolve Outputs
-
Select the Vector panel,
 .
.
-
For the Result type, select the result type from the drop-down menu and click
Apply.
This plots the result type you selected for all relevant graphics in the model. You may have to scale the force vectors accordingly to make sure they are visible.
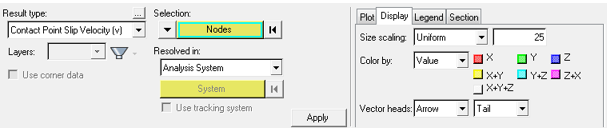
Figure 25. Scaling the Tangential ForceFor example, the point slip velocity vectors are plotted in the figure below: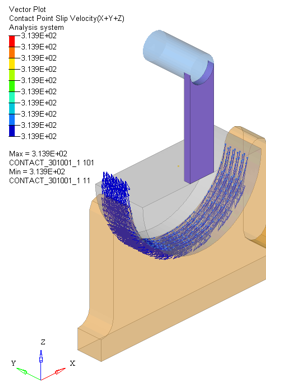
Figure 26. Point Slip Velocity Vectors
Plot the Contact Forces via ABF
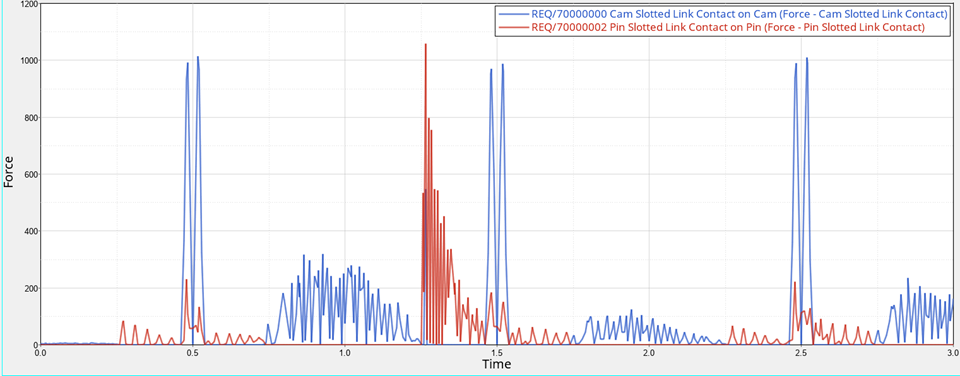
Figure 27. Total Contact Force Magnitude
Manually Plot Other Output Requests
-
Click Add Page,
 , and change the client to HyperGraph 2D,
, and change the client to HyperGraph 2D,  (if it is not already selected).
(if it is not already selected).
-
Click the file browser icon, , to open the ABF output file for the simulated
model.
-
Click Apply.
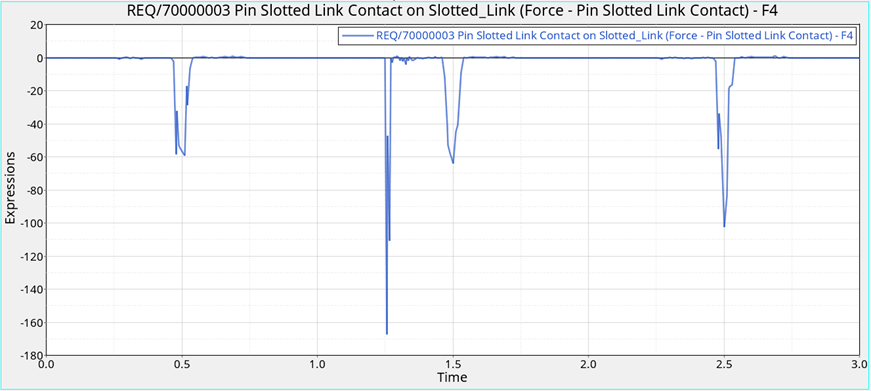
Figure 28. Visualizing the Contact Force in HyperGraph
Summary
In this tutorial, you learned how to create a well-meshed representation from CAD geometry. Further, you learned how to set up contact between meshed geometries. Also, you were able to inspect the geometry to make sure the surface normals were correct and there were no open edges or T connections.
You were also able to setup a transient analysis to calculate the contact forces between these geometries and post-process the results via vector and contour plots, in addition to plotting the contact force requests.