MotionSolve is able to do co-simulation with Altair/EDEM,
using the bulk material simulation interface. Through EDEM, you can simulate the interaction of
multi-bodies with granular materials such as stones, sand, grass, capsules, and so
on.
Use the EDEM Subsystem utility in MotionView to create a sub-system that contains the entities needed for the co-simulation. The
sub-system entails all components that interact with the bulk material. Optionally, the
graphics from MotionView can be transferred to EDEM using the
same utility.
Turn on the coupling server in EDEM while being in the Simulate mode.
Start the MotionSolve simulation from the Run panel in
MotionView.
Figure 1. The user-interface for creating an instance of the MotionSolve-EDEM
interaction
Build Model using EDEM Subsystem
The EDEM
subsystem tool defines the co-simulation settings between MotionSolve and EDEM. Within the tool, you can:
Transfer graphics (for rigid and flexible bodies) from MotionView into EDEM.
Note: This is particularly useful in cases
where the multibody model contains a large number of components, such as a chain drive.
This resolves the need to remodel the same components in EDEM. MotionView transfers to EDEM through an EDEM Coupling
server.
Transfer and set up tire geometry to model a flexible tire (from Pratt-Miller) in
EDEM.
Choose if EDEM runs locally or on a separate server.
Define the communication parameters if EDEM runs on a separate server.
Define simulation settings, such as the communication interval and simulation start time
of EDEM.
From HyperWorks v2020, the interface is supported on
Windows as well as Linux platforms. The interface can be used in cross-platform scenarios
(HyperWorks on Windows and EDEM on Linux or
vice-versa).
To invoke the tool, click on the EDEM Subsystem icon from the Bulk Material Interface toolbar to bring
up the panel as shown below: Figure 2. EDEM Subsystem Panel
Use the collector to pick the graphics/body/AutoTire that will interact with the bulk
material in EDEM. When selecting using the Body collector, all valid graphics associated
with the body will be selected. Graphics of type Box, Cylinder, Sphere, Ellispoid,
CADGraphics, FileGraphics can be selected from the graphics area.
Use the Body collector to select a flex body (CMS).
AutoTire can be used to transfer a Pratt-Miller flexible tire. Refer to the AutoTire - Auto Entity documentation to learn more about setting up
a flexible tire for co-simulation with EDEM.
Tip: Use the Select a Graphic/Body dialog to pick multiple graphics
simultaneously (double click on the collector to display this dialog).
Figure 3. Select a Graphic Dialog
Note:
This functionality currently supports the following graphics: Box, CADGraphic,
Cylinder, Ellipsoid, File (mesh-based graphics such as H3D/OBJ) and Sphere. Any
other type of graphics selected using the Advanced Graphics selector dialog will
not be used and a warning message will be displayed.
Selected graphics that have no bodies assigned will be highlighted in red in the list. Such graphics should be removed from the
list before transferring the geometry to EDEM or creating the EDEM system.
To control the coarseness of the tessellation of the graphics (CADGraphics and
Primitives) that go into EDEM, click the Mesh Refinement
button.
Maximum facet width ratio
Maximum width of elements in meters.
Curve chord tolerance factor
Tolerance factor that controls chordal deviation along curved
edges.
Surface plane tolerance factor
Tolerance factor that controls surface deviation along curved
surfaces.
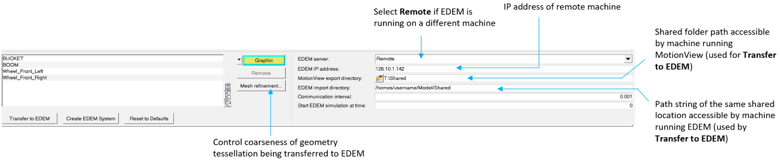
Select the EDEM server:
Local if EDEM are running on the same local machine as
MotionView and MotionSolve.
Remote if EDEM is running on a different machine.
EDEM IP address - Specify the IP address of the machine where EDEM application
is running. Default is set to 127.0.0.1 which refers to the local machine.
MotionView Export directory – This is applicable
only for transferring geometry to EDEM on a remote server. Select a shared
directory which is accessible by both machines. MotionView will use this directory as a temporary location
to transfer the geometry.
EDEM Import directory – Path string of the same shared directory as above but
as recognized by the machine running EDEM.
Specify the communication interval between MotionSolve and EDEM.
To transfer geometry to EDEM, with the EDEM GUI on and coupling server turned ON
, click on Transfer to EDEM to transfer
the selected graphics as geometries to EDEM.
Start EDEM simulation at time - Enter a time at which the EDEM
simulation is starting. The coupling between MotionSolve and
EDEM will be established once MotionSolve reaches the
specified time. Default is 0.0.
The model is now ready for co-simulation with EDEM.
Note: The components in EDEM can be created
independently. The names for the components should have names as component_0000,
component_0001 and so on. For flexible bodies, the naming convention is
flex_component_0000 and so on. The naming sequence should match with the sequence of
graphics selection in the tool.
Analyze Model
Once the model is defined, the solution process is identical to performing a “MotionSolve-only” simulation.
Use the Run Solver panel in MotionView/MotionSolve to start the simulation. MotionView will launch MotionSolve.
MotionSolve will connect to EDEM (coupling server in EDEM
should be ON) in the specified machine as a sub-process and start the communication. From
here on, no additional user intervention is required to analyze the system.
Note: EDEM allows
you to run at a variable or fixed step size. It is recommended that you run the simulation
at a fixed step (usually 1e-4 or 1e-5 is adequate). Furthermore, you should ensure that
the communication interval is exactly divisible by the step-size you selected. This will
ensure that the EDEM solver will be exactly at the time required to communicate its forces
to MotionSolve.
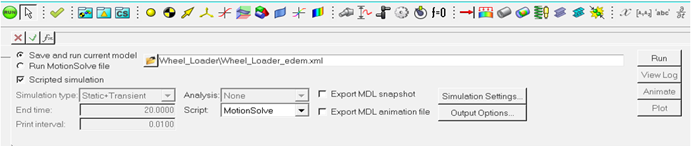
Figure 4. The user-interface for running a MotionSolve + EDEM simulation
Tip: The MS/EDEM cosimulation in batch mode utility is
available under the EDEM Menu if the cosimulation
needs to be run in batch mode.
Review Results
The EDEM results can be viewed in HyperView by translating it
into the H3D format using the Generate H3D from EDEM results tool
under the EDEM menu in MotionView. Figure 5.
In the Generate H3D from EDEM dialog that appears, provide the EDEM model file
(.dem) and specify the units to be converted into.
Note: Generating H3D from EDEM results is a computationally intensive process. A high
performance computing (HPC) machine is recommended for very large size results.
Now, MotionSolve and EDEM results are available in two
separate H3D files. MotionSolve H3D contains the system-level
information. EDEM H3D contains the bulk material information.
Use the Animate button in the MotionView Run panel to load the MotionSolve H3D into a HyperView
window.
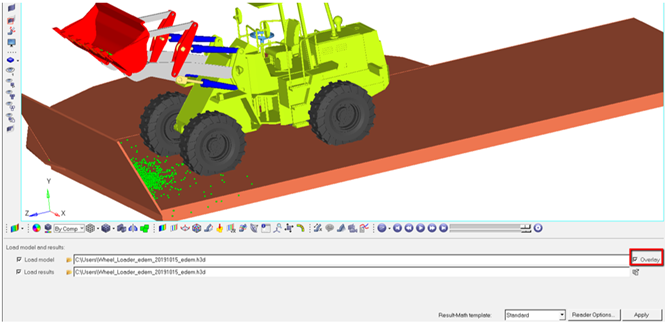
Overlay the EDEM H3D in HyperView using the
Overlay option in the Load Model and Results panel to visualize
the entire system in one environment.
Figure 6. The user-interface for overlaying a MotionSolve + EDEM simulation result
Known Limitations
MotionSolve supports up to 1024 rigid components to interact
with EDEM.
Multiple instances of EDEM coupling is not supported.
NLFE Bodies are not supported.
Certain graphics when transferred to EDEM may appear un-merged as several components.
Use the “Merge Geometry” tool in EDEM to merge them into one component.
Save/Load in MotionSolve, in conjunction with corresponding
operations in EDEM, is not supported.
Quasi-static and Linear analysis are not supported with this connection.
On Windows if Microsoft C++ 2010 SP1 Redistributable Package (x64) is not available,
then the co-simulation will fail with an error "Failed to load edem.dll".
 EDEM Subsystem utility in MotionView to create a sub-system that contains the entities needed for the co-simulation. The
sub-system entails all components that interact with the bulk material. Optionally, the
graphics from MotionView can be transferred to EDEM using the
same utility.
EDEM Subsystem utility in MotionView to create a sub-system that contains the entities needed for the co-simulation. The
sub-system entails all components that interact with the bulk material. Optionally, the
graphics from MotionView can be transferred to EDEM using the
same utility. 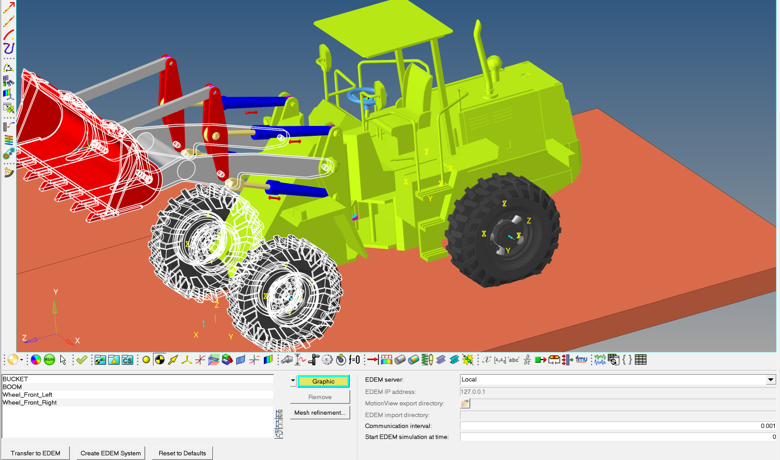

 , click on Transfer to EDEM to transfer
the selected graphics as geometries to EDEM.
, click on Transfer to EDEM to transfer
the selected graphics as geometries to EDEM.