MV-2051: Frequency Response Analysis using MotionSolve and Compose
In this tutorial, you will learn how to convert a multibody model to its equivalent state space form using MotionSolve and obtain corresponding matrices, use these state space matrices to construct an equivalent LTI system of the multibody model within Altair’s Compose, and perform a frequency response analysis on the LTI system by plotting a Bode Plot diagram.
This is an extension of tutorial - MV-2050: Linear Analysis for Stability and Vibration Analysis.
Control system design becomes computationally simpler using mathematical tools like transfer function that can only be applied on Linear time-invariant systems (LTI systems). Linear systems have outputs as a linear combination of inputs. A wide range of physical systems can be approximated very accurately by LTI models.
A Linear Time Invariant (LTI) system in the state space form is described as follows:

where A, B, C, and D are the state matrices, x is the state vector, u is the input vector, and y is the output vector.
MotionSolve can linearize a multibody system by calculating the state matrices for a given set of inputs and outputs through a linear analysis. The states are chosen automatically by MotionSolve.
Frequency response concepts and techniques play an important role in control system design and analysis. In frequency-response methods, we vary the frequency of the input signal over a certain range and study the resulting response.
In this tutorial, you will learn how to convert a multibody model to its equivalent state space form using MotionSolve and obtain corresponding A, B, C and D matrices. These state space matrices will be further used to construct an equivalent LTI system of the multibody model within Altair’s Compose. Next, a frequency response analysis will be performed on the LTI system using Compose by plotting a Bode Plot diagram.
Next, you can then perform control system design using a variety of tools available within Compose, however this is out of the scope of this tutorial.
Open and Review the Model
-
Click on Open Model,
 ,
from the Standard toolbar.
,
from the Standard toolbar.
-
Review the simplified model.
The Model contains:
- Two bodies that represent the suspension and bus body.
- Two springs connecting the bus, suspension and the road.
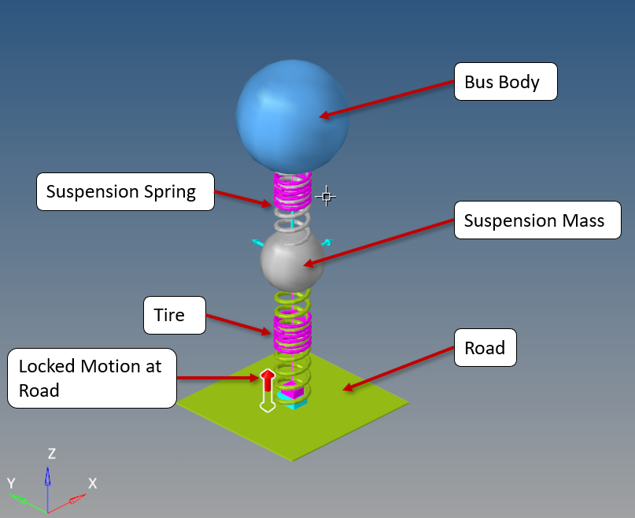
Figure 1. Simplified Bus Model With No External DisturbanceNow, consider a hypothetical force (obtained from a controller) that acts on suspension mass in order to improve the response of system (in other words, bus body displacement) under the effect of disturbance from road. A simplified block diagram of such a system showing its input and output is shown below.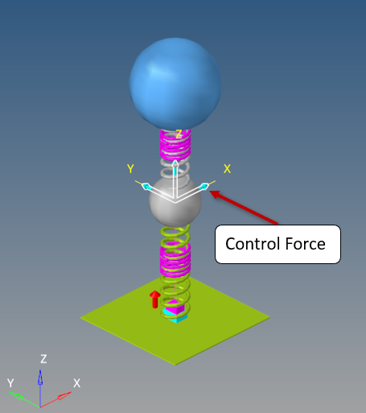
Figure 2. Plant Input - Control Force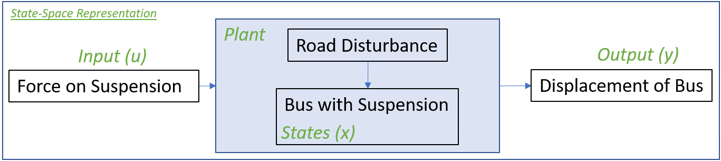
Figure 3. Block Diagram of Plant Showing its Input and Output
Transient Analysis - Response at First Mode
In previous tutorial (MV-2050) the first mode of this system was identified at 1.63Hz (~10.24 rad/s). In this step you will identify the response of this system (in other words, Displacement of Bus) when a unit force is applied at a forcing frequency of 10.24rad/s at Suspension Body.
-
Review the force.
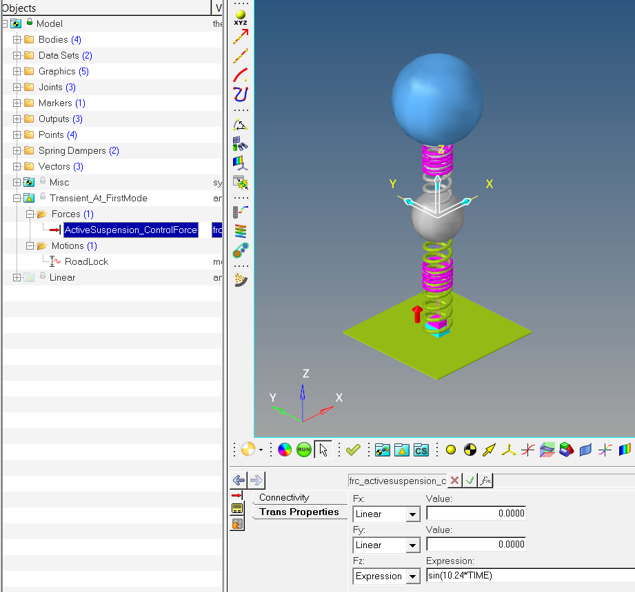
Figure 4. Model with Transient Analysis at Forcing Frequency of First Mode -
Run the model.
- Go to the Run panel
 .
. - Rename the XML file to SimplifiedTwoSpring_Trans.xml.
- Set Simulation type to Static+Linear.
- Set Analysis to Transient_At_FirstMode.
- Go to the Run panel
-
Review the results in HyperGraph and plot the
displacement output of BusBody in the vertical direction (Z axis).

Figure 5. Plot Settings for Output Response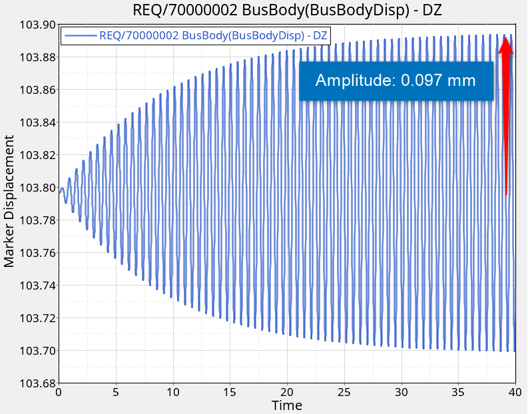
Figure 6. Amplitude of BusBody Displacement for Transient Run
Linear Analysis - Plant Input
In this step you will setup the input of the plant (u). A control force will be applied on the Suspension Mass.
-
Activate analysis Linear Analysis in the model by right-clicking on
Linear in the browser and then selecting
Activate > Selected only.
Note: Review the existing motion in the analysis. An external disturbance is modelled as displacement motion at Road which is currently locked (in other words, zero displacement) to avoid transient conditions.
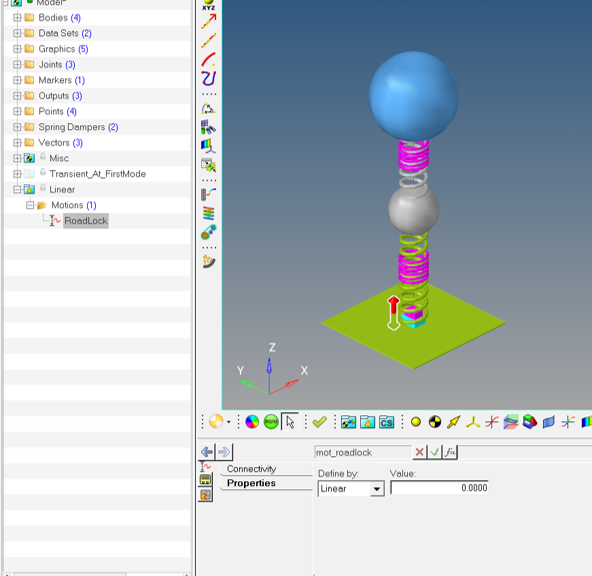
Figure 7. -
Add a SolverVariable to the analysis Linear Analysis that can obtain the input
from the controller to the plant.
- From the Project Browser, right-click
Linear analysis and select (or right-click
 on the Control Entity
toolbar after selecting Linear analysis in the
Project Browser).The Add SolverVariable dialog is displayed.
on the Control Entity
toolbar after selecting Linear analysis in the
Project Browser).The Add SolverVariable dialog is displayed.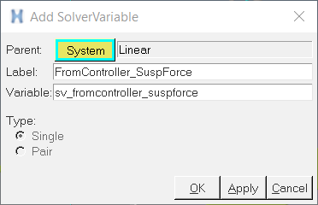
Figure 8. Add SolverVariable to Represent an Input Port for the Plant - Change the Label to FromController_SuspForce. Leave the definition as the default.
- From the Project Browser, right-click
Linear analysis and select (or right-click
-
Add a Solver Array to the analysis Linear Analysis to define input to the
plant.
- From the Project Browser, right-click
Linear analysis and select (or right-click
 on the Control Entity
toolbar after selecting Linear analysis in
Project Browser).The Add SolverArray dialog is displayed.
on the Control Entity
toolbar after selecting Linear analysis in
Project Browser).The Add SolverArray dialog is displayed.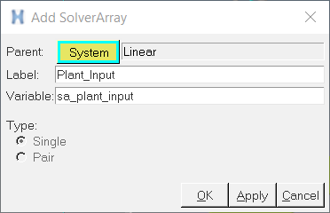
Figure 9. Add SolverArray for Plant Input - Change the Label to Plant_Input and click OK.
- From the panel, change Array type to Plant Input using the drop-down menu.
- Choose the SolverVariable as FromController_SuspForce using the SolverVariable collector.
- Activate the Use in linearization check box.

Figure 10. Details of the Plant Input
- From the Project Browser, right-click
Linear analysis and select (or right-click
-
Add a force.
- From the Project Browser, right-click
Linear analysis and select (or right-click
 on the Force Entity
toolbar after selecting Linear analysis in
Project Browser).
on the Force Entity
toolbar after selecting Linear analysis in
Project Browser).The Add Force dialog is displayed.
- Change the Label to ActiveSuspension_ControlForce and click OK.
- From the panel, choose SuspensionMass as the
Body.Note: Double click on the Body collector to invoke the advanced entity selector dialog and turn off the Only show entities within valid scope option to be able to choose the SuspensionMass body which is outside the Analysis.
- Choose SuspensionMassCG as the point of application of the force.
- In the Tran Properties tab, change Fz to
Expression and set it to
`{sv_fromcontroller_suspforce.VARVAL}`.Note: The Expression Builder can be used to create this expression.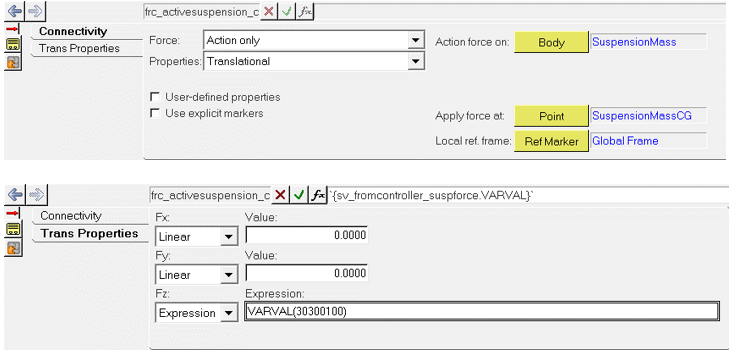
Figure 11. Force Definition
The input from the controller as defined by the solver variable will now be used by the force entity as described by the expression. - From the Project Browser, right-click
Linear analysis and select (or right-click
Linear Analysis - Plant Output
In this step you will set up the output of the plant (y). A solver variable and solver array will be added to the Linear analysis in a similar way shown in Step #3 above.
-
Change the Type to Expression and set its value to
`DZ({b_busbody.cm.idstring})`.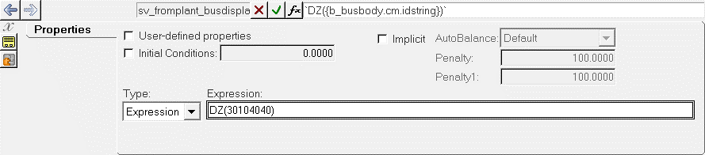
Figure 12. Edit SolverVariable to Specify BusBody Displacement -
Add a Solver Array with a Label of Plant_Output to
define the output to the plant.
- Change Array type to Plant Output using the drop-down menu.
- Choose the SolverVariable as FromPlant_BusDisplacement using the SolverVariable collector.
- Activate the Use in linearization check box.

Figure 13. Details of the Plant Output
Set Up and Run a Linear Analysis
-
Set up the analysis type.
- Go to the Run panel .
- Rename the XML file to SimplifiedTwoSpring_LTI.xml.
- Set Simulation type to Static+Linear.
- Set Analysis to Linear.

Figure 14. Run Panel Settings - Go to the Run panel
-
Set up the simulation settings.
- Click the Simulation Settings button.
- Choose the Linear tab from the dialog.
- Activate the Altair Compose/Activate OML check box from the Generate State Space Matrix group.
- Uncheck the Eigen values and vectors (.eig) option.
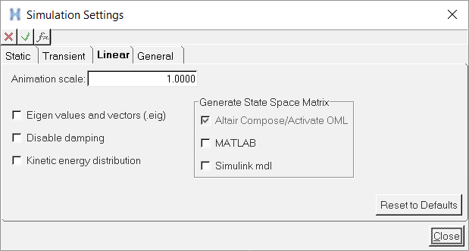
Figure 15. Simulation Settings -
Set up the output options.
- Click the Output Options button.
- Activate the Write debug info check box from the
General tab.This will list the states chosen by MotionSolve in the solver log window.
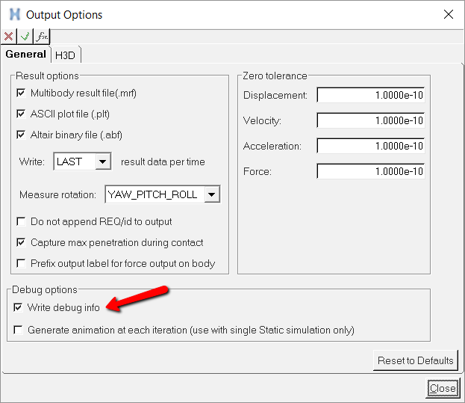
Figure 16. Output Options - Set Analysis to Transient_At_FirstMode.
-
Once the run is complete, review the solver window and observe two independent
coordinates chosen for defining states for the system by MotionSolve (in other words, Translation in Z for BusBody
and SuspensionMass respectively).
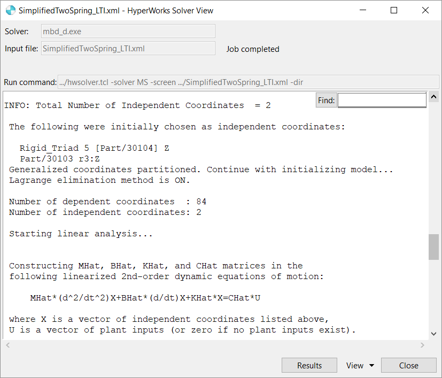
Figure 17. Solver Log Window
Frequency Response Analysis in Compose
In this step you will perform a frequency response analysis in Compose using the state space model from MotionSolve. Note that the during the run, an input signal of varying frequencies is supplied to the LTI system and due to its property, the magnitude and phase of the output signal changes while the frequencies itself remain the same.
-
Open Altair Compose and open
 the oml script
SimplifiedTwoSpring_LTI.oml.
the oml script
SimplifiedTwoSpring_LTI.oml.
- Review the A,B,C and D matrices.
- Observe the four states listed for the system.
Two states, namely displacement and velocity, are derived from each independent coordinate as described in the MotionSolve solver window.
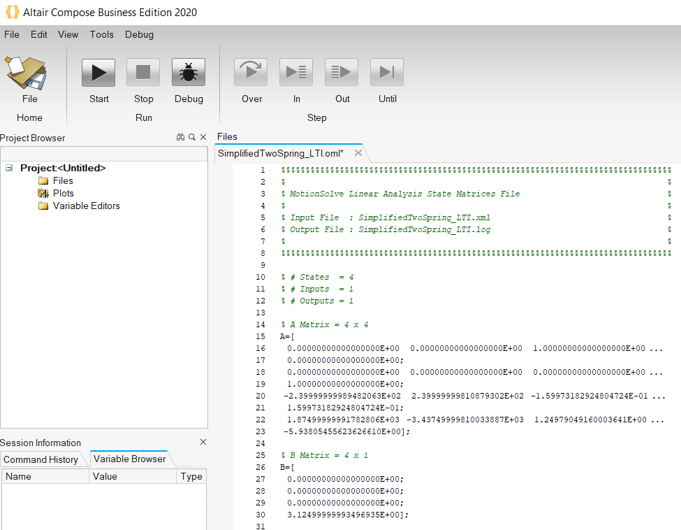
Figure 18. Review the OML File -
Copy and paste the following lines of code:
%Construct a state-space model SYS=ss(A, B, C, D); %Construct a transfer function model %SM_TF=tf(SYS); %Plot a Bode Diagram %bode(SYS,R); %Create a row vector with logarithmically spaced 1000 elements for defining Frequency on X axis R=logspace(-1, 3, 1000); %Obtain magnitude and phase response of system using Bode Diagram [mag,phase]=bode(SYS,R); %Set up first plot to show magnitude vs frequency using subplot function subplot(2, 1, 1); %Set the title for the plot title('Frequency Response Plot'); hold on; grid; %Plot 'mag' in 2D axes with log scale 'R' semilogx(R,mag); %Annotate the x and y axes hx=xlabel('Frequency [rad/s]'); hy=ylabel('Magnitude: BusBody Disp [mm] / Control Force [N]'); %Set up second plot to show phase vs frequency using subplot function subplot(2, 1, 2); hold on; grid; %Plot 'phase' in 2D axes with log scale 'R' semilogx(R,phase); %Annotate the x and y axes hx=xlabel('Frequency [rad/s]'); hy=ylabel('Phase [deg]');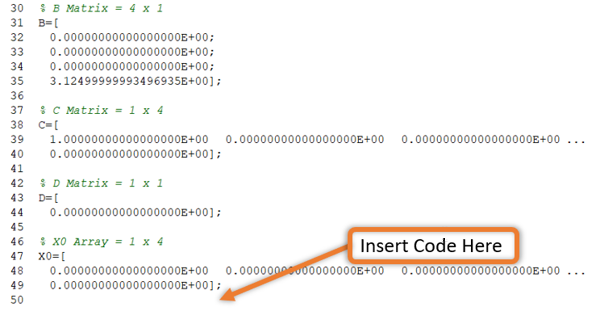
Figure 19. Insert Code LocationNote: ‘%’ symbol at the start of a line indicates a comment. Review the comments and refer to the Compose documentation for further details. Creating a transfer function is commented out since it is not required for this tutorial. The Default Bode diagram function is also not used here since it uses the decibel scale that is not suitable for this application. -
Run the script by clicking the Start
 button.
button.
-
Observe the variables getting created in the Variable Browser.
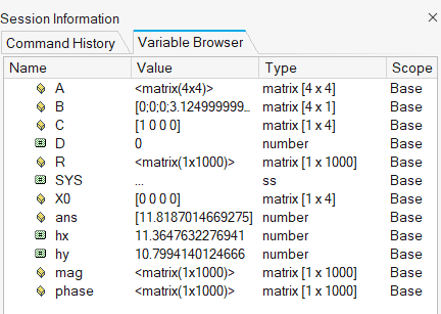
Figure 20. Variable Browser -
Check the figure showing the variation of magnitude and phase of the input
signal as a system response over a range of frequencies.
Note: Two peaks are observed 10.24 rad/s (1.63Hz) and 59.44 rad/s (9.46Hz) corresponding to the natural frequencies of the system.
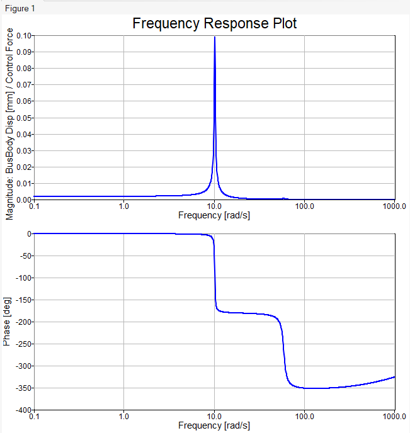
Figure 21. Frequency Response PlotsFrom the Bode Plot one can observe that the amplitude of BusBody displacement per unit force at first mode (10.24 rad/s) would be around 0.098 mm. This output of an approximated linearized model is very close to what we obtained from the MotionSolve transient simulation performed in Step 2. Thus, this linearized model can be further used to perform control system design using Compose.