运行设置
使用“运行设置”工具更改默认运动运行设置。
您可以控制运动仿真的运行时间、结果输出的帧数量、分析类型以及是否包含重力。
位置:“运动”功能区,“运行”图标组,“分析运动”图标
将光标移动到“分析运动”工具上,点击出现的 ![]() 卫星图标,即可更改运动分析的运行设置。
卫星图标,即可更改运动分析的运行设置。
编辑运动运行设置
使用“运行运动分析”窗口更改运动运行分析设置。
-
将鼠标悬停在分析运动工具上并点击运行设置
 卫星图标。
卫星图标。
注:
- 使用导出按钮,导出包括分析设置的运动模型,格式为 MotionView 文件 (.mdl) 或 MotionSolve py 文件 (.py)。
- 在导出时选择单位,但最好在“偏好设置”中设置首选模型单位,然后在导出之前先运行模型。
- 使用重置 > 默认选项,还原模型所有的默认运动分析设置。
基本设置
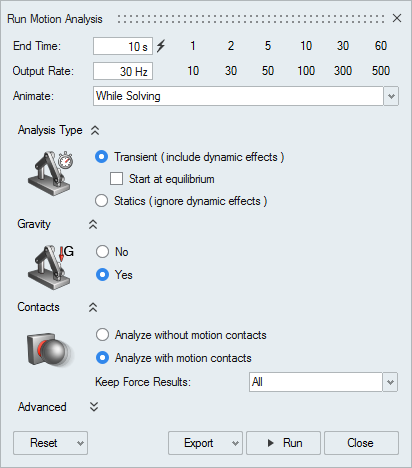
使用“运行运动分析”窗口中的选项定义运动分析。
图 1. 运行运动分析- 结束时间
- 结束时间表示运行运动仿真所需的时间。点击计算结束时间时按住 Ctrl 键可以延长 10% 的时间。这对查看轮廓结束时的模型运行状态很有帮助。
- 输出率
- 输出率控制结果输出中的帧数量。数字大则表示结果更为平滑、更有连续性,但动画效果较慢。
- 动画
- 该选项控制求解时是否为模型添加动画效果。如果选择完成后,运行将完成得更快。如果运行成功,按空格键或点击动画工具栏上的“播放”按钮,即可回放动画。
- 分析类型
- 运动分析可为瞬态、静力学或两者皆有。
- 瞬态分析用于将动态效果包含于依赖时间的运动仿真中。启用平衡时开始,首先从平衡解开始。
- 静力学分析用于决定您机构的静力平衡位置。这种分析类型要忽略所有速度和阻尼项。这有助于您分析载荷,而无需将动态效果包含在内。
- 重力
- 该设置用于将重力包含或排除于运动分析中。要包含重力,首先必须使用“重力”工具施加重力加速度。
- 接触
-
- 分析(不包含运动接触):选择该选项将运动接触从运动分析中排除。
- 分析(包含运动接触):选择该选项将运动接触包含在运动分析中。
-
保持力的结果是一个全局设置,用于控制运动分析后存储在模型中的接触力数量。选择所有、仅区域或无。
“仅区域”选项与“力浏览器”中“总力”的“位于区域”设置相对应。如果您选择“仅区域”或“无”,请注意,在使用“力浏览器”为运动结果添加动画效果时,您将仅能看到您针对给定接触所指定的内容等级。例如,如果您选择“仅区域”,则仅能看到单独(未相加的)力向量。同样,如果您选择“无”,则不会看到任何接触产生的力向量。
注: 如果您希望覆盖“保持力的结果”的全局设置并单独处理运动接触,可以在“属性编辑器”中实现。
高级设置
点击高级旁的锯齿形图标 ![]() ,显示与求解器设置、模型检查及绘图相关的高级选项。
,显示与求解器设置、模型检查及绘图相关的高级选项。
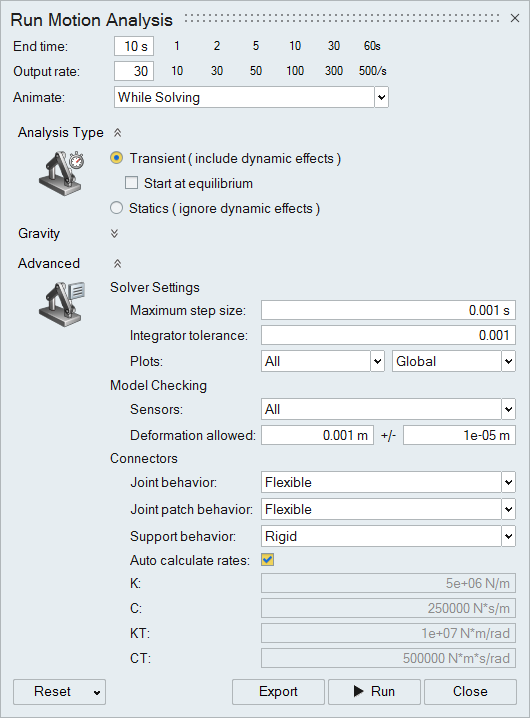
图 2. 高级设置
求解器设置
- 最大步长
- 积分允许的最大步长。
- 最大积分阶次
- 这是积分允许的最大阶次。默认值为5;更高阶次准确度更高,但稳定性更低。在一些应用中,如间歇性接触,用户可能会想覆盖默认值并将其设置为更小的值,比如 2(或 1)。
- 积分容差
- 该容差代表每个积分步进的最大绝对错误。
- 积分 DAE 指数
- 这是求解器的微分代数方程 (DAE) 指数。选项为 I3(默认)或 SI1。在给定积分容差的情况下,选择 SI1 可能会提高精度,但也可能会增加运行时间。
- 图表
- 为图表所创建的内容(所有、为零件排除、无)以及使用的参考帧(全局、本地)提供选项。
- 保存最后一次运行
- 关闭该选项可以在保存模型时将运动结果排除,从而缩小 .stmod 文件的大小。
- 生成动画文件
- 生成动画文件时,您可以选择包含所有数据,排除接触数据或无。启用后,MotionSolve 将在运动分析成功结束时将 run.h3d 文件写入“运行记录”文件夹。该文件可用于在 HyperWorks(通过 HyperView)中或通过独立的 HyperView 播放器播放动画。如果模型有运动接触,则排除接触数据设置对于减小 H3D 文件的整体尺寸很有用,而默认设置(无)可防止 .h3d 文件因进行运动分析而被写入。
- 日志文件
- 选择“保留”以保留运行中产生的与运动相关的求解器文件。选择“丢弃”以自动删除运行完成后产生的文件。根据需要,点击“立刻删除”按钮即可删除日志文件。
模型检查
- 传感器
- 提供使用哪种模型检查传感器(所有、排除铰接变形、无)的选项。
- 允许变形
- 为铰接指定允许的变形 + 或 - 容差值。默认值为 1 mm。
连接器
使用这些设置在全局级别覆盖连接器的默认运行状态。默认情况下,所有铰接都表现为柔性。当以下选项设置为“柔性”,铰接的运行状态为线性轴套模型。设置为“刚性”时,铰接处于理想状态,不会变形。当该选项设置为“虚拟”时,它与刚性铰接非常相似,但具有“软约束”行为,对于避免冗余铰接很有用。
- 铰接状态
- 铰接和滑动铰接的默认设置为“柔性”。
- 铰接补块状态
- 共享几何特征的零件上的铰接,其默认设置为“柔性”。
- 固定约束状态
- 固定约束的默认设置为“刚性”。
- 自动计算速率
- 默认状态下,自动确定全局速率(如下所示)。禁用该选项以输入您自己的速率。
如果以上任何运行状态设置为“柔性”,以下全局速率适用。(虚拟和刚性铰接不适用速率。)
- K:刚度率
- C:阻尼率
- KT:扭转刚度率
- CT:扭力阻尼率
注: 要控制单个铰接的运行状态而非更改以上全局连接器设置,请使用“属性编辑器”中的“运行状态”属性。
快捷键
| 要 | 则 |
|---|---|
| 中止运行 | 按 Esc 键 |