Adhesion Model and Single Phase Surface Tension Models
Both single phase surface tension and adhesion modeling is based on the work of
Akinci et al.
Tartakovsky Model
The Tartakovsky model
is based on [8]. In principle it uses the same approach as the Akinci model (see
below), which is an inter-particle force that mimics the surface tension effect. The
difference with respect to the Akinci model is that the Tartakovsky model derives an
expression which is scaling the inter-particle force in such a way that physical (or
close to physical) values of the surface tension coefficient could be used. This is
meant to avoid the tuning of the numerical parameters, as is the case in the Akinci
model.
It is important to note that for the Tartakovsky model to work
correctly, appropriate speed of sound (compressibility of the fluid) should be
selected. Furthermore, exact implementation from the paper requires an interaction
radius of 6*dx (6 particles in size). For performance and infrastructural reasons,
in nanoFluidX the radius is limited to 3*dx (3 particles in size). This may have a
limited impact on the fidelity of the results in certain situations.
For further
reading refer to [8].
Akinci Models
Both Single phase surface tension and adhesion modeling is based on the work of
Akinci et. al. [3]. Both models are capable of reproducing qualitatively realistic
results, but are in principle unphysical and cannot be generalized for an arbitrary
case/simulation. Because of this, trial-and-error tuning of the surface tension
coefficient and the adhesion coefficient is necessary if realistic fluid behavior is
to be achieved.
Both adhesion and single phase surface tension models rely on a form inter-particle
force, which binds the particles together. The way the force is modeled is through a
specific kernel shape which mimics a potential energy well. In that sense, particles
tend to keep a certain distance from each other and introduce elastic forcing if the
particles get too close or too far from each other.
The equation that dictates the adhesion force is given by:(1)
While the single phase surface tension is defined by:(2)
Where,
Indicies and
Stand for adhesion and cohesion.
Is the appropriate kernel used for each of the forces.
Is the mass of the particle.
Is the distance between two interacting particles.
and
Are instantaneous particle densities.
Is the default density value of the particle phase.
Is the adhesion coefficient.
Is the cohesion or surface tension coefficient.
The parameter is specified for each WALL or MOVINGWALL
phase. That means that the level of adhesion can be different for every WALL or
MOVINGWALL phase. The same applies to the value for the surface tension forces. The balance
between surface tension and adhesion forces can replicate qualitatively the physical
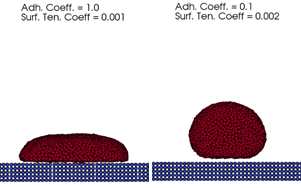
contact angles between the fluid and the solid elements. An example of balancing
adhesion and surface tension forces is shown in Figure 1. Figure 1. Single Phase Fluid Droplet on a Plate. Using different values of the adhesion and surface tension coefficient
produces effects of different contact angles.
The adhesion model can be used in conjunction with the more physical multiphase
surface tension model. In that situation, the surface tension forces are physical
and only the adhesion model is left to be tuned, which can be a significantly easier
exercise.
Modeling physical behaviour of single phase surface tension and adhesion
In order to partially ease the burden on the user, nanoFluidX team has performed a number of tests resulting in
the development of consistent single phase surface tension and adhesion behaviour.
By consistency it is meant that if appropriate/desired behaviour is found for a
given resolution and a given surface tension or adhesion coefficient – such
behaviour can be replicated for other resolutions by following the below
methodology.
The simulation data show that the variations of surface tension coefficient and adhesion coefficient due to particle spacing changes can be modeled as . and are case dependent and will take different values
depending on the resolution and specific phenomena of the simulation. It is
recommended to set and for surface tension and adhesion, respectively.
The procedure to obtain new or when changes is as follows:
Assume your current values are , , and .
You have a new and wish to find and .
Set for surface tension and use for adhesion.
Use and or and solve for .
For example:(3)
or (4)
Use the computed above to find or .
For example,(5)
or (6)
These approximations are to save time when the user wants to change . They are not perfect fits and some iteration maybe
needed to find the adequate values.