AutoDamper
The AutoDamper entity is a force-velocity model designed to easily simulate a shock absorber used in ground vehicles. The AutoDamper entity reads force-velocity data from a file written in the TeimOrbit format.
- The damper properties are defined in a readable ASCII format file.
- The damper file can be referenced multiple times in the model (for symmetric dampers and for dampers that are used in more than one location).
- The data file format is used in other MBD codes, such as SIMPACK and ADAMS.
- The math that defines the Force-velocity relationship is contained in a subroutine, instead of in the user interface.
The Autobush uses a Force_Scalar_Twobody XML statement in the MotionSolve deck, along with a subroutine to calculate the force in the bushing.
Damper Graphic
A Damper graphic appears when an AutoDamper is added. The graphic includes two cylinders (shown in Figure 1).
The gray cylinder is attached to Body 1 and will move with that body. The red graphic is associated with Body 2 and will move with Body 2. Graphic sizes are calculated automatically and can be modified by expert users by editing the damper system definition.
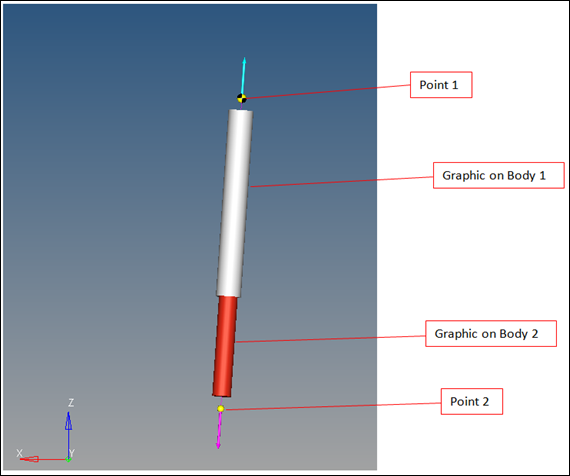
Figure 1. AutoDamper Graphic
Connecting an AutoDamper
Sample TeimOrbit Damper File
$----------------------------------------------HEADER
[HEADER]
FILE_TYPE = 'dpr'
FILE_VERSION = 4.0
FILE_FORMAT = 'ASCII'
$----------------------------------------------UNITS
[UNITS]
LENGTH = 'mm'
ANGLE = 'degrees'
FORCE = 'newton'
MASS = 'kg'
TIME = 'second'
$----------------------------------------------CURVE
[CURVE]
{ vel force}
-4916.935 -8.889
-1000.0 -3.0
-500.0 -1.5
-250.0 -0.75
-100.0 -0.3
0.0 0.0
100.0 0.3
250.0 0.75
500.0 1.5
1000.0 3.0
4914.298 9.0416