ポイント結合リアライゼーション手法
ポイント結合のリアライゼーションのプロセスと方法の概要。
以下のフローチャートは、ポイント結合のリアライゼーションに最適な手順の構築用に4段階のプロセスの概要を示しています。
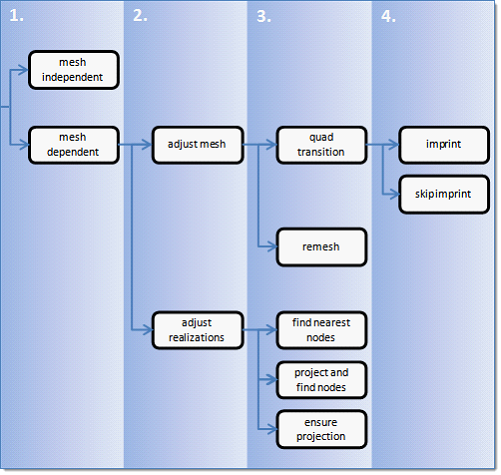
図 1.
図 1.
-
Connectivityの見出しの下で、リアライズタイプを選択します。
- mesh independent
- リアライゼーションのボディのメッシュ変更を必要とせず、主にソルバー固有のカードや0D要素を介して接続が定義されているリアライゼーション、例えば、NastranのCWELDやOptiStructのACMなどに使用します。
-
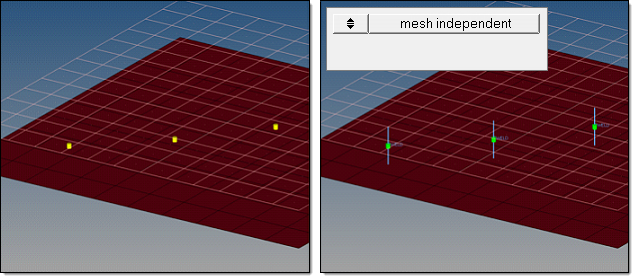
- mesh dependent
- 他のすべてのケースではこちらを使用します。
-
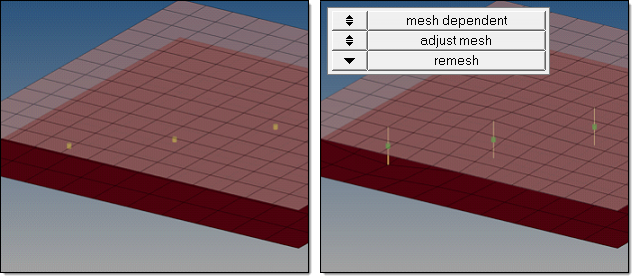
実行の方法を選択します。
- Adjust Mesh
-
- remesh
- 投影ポイントを考慮し、溶接をリンクに結合するためにスナップおよび分割機能のみを使用します。
-
- quad transition
- 投影ポイントの周りに完全な形状の四角形要素を作成します。デフォルトでは、四角形要素のサイズはメッシュサイズの平均で定義されます。必要であれば、Quad Size欄に要素サイズを指定することもできます。
- デフォルトでは、スナッピングは四角形パターンの要素サイズの1/3の距離まで可能です。四角形パターンの要素サイズが10.0で定義されている場合、外側の節点を3.3の距離にあるフィーチャーにスナップさせることができます。アルゴリズムは四角形パターンのすべての3つの節点にスナップするか、どれにもスナップしないことを試みます。

左上のイメージはモデルの初期の状態です。その他の図は、quad transitionを有効にして、四角形パターンサイズに平均値、大きい値、小さい値をそれぞれ使用してリアライズされたコネクターを示してます。赤い線は節点がスナップされた関連するフィーチャーまたはフリーエッジを示します。 - 以下の図は、モデルが適切なパターンサイズの四角形要素移行としてリアライズされていることを除いては、上記と同じです。
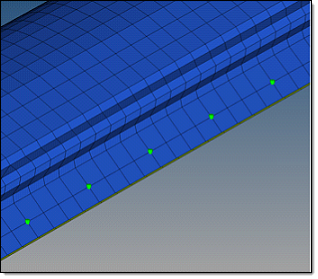
- 湾曲している領域では、内側と外側の要素エッジの長さが異なっている点に注目してください。
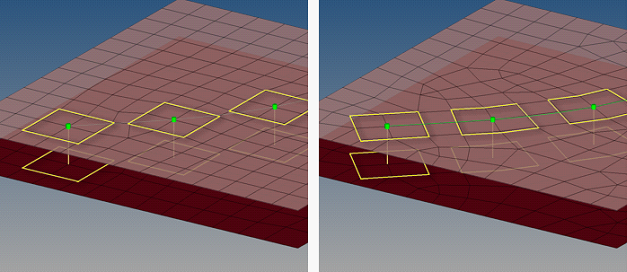
図 2.
- Adjust Realizations
-
- find nearest nodes
- 与えられたトレランスに基づき最も近い節点を検索し、T接合やそれに似た領域との接合を可能にします。このオプションは、コネクターが完全に配置されていない場合にも有効です。リアライゼーションは、非直交になります。
- 最も近い節点の検索には、投影は実行されません。
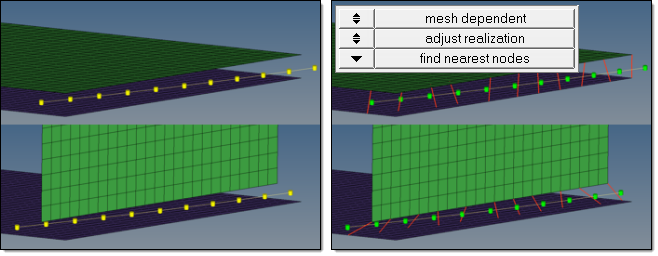
図 3. - project and find nodes
- 最初のステップでリンクエンティティへの有効な法線投影が必要となります。2番目のステップでは、投影ポイントに最も近い節点を結合に使用します。法線投影ができない場合は、下図のようにリアライゼーションができません。
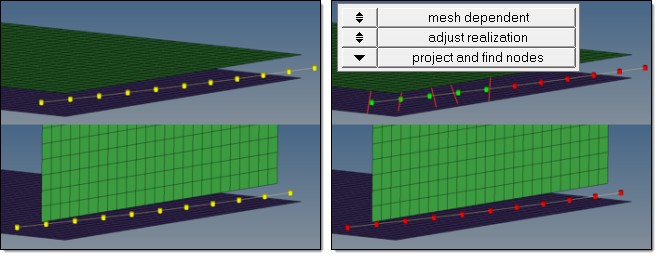
図 4. - 5度より小さい角度は直交としてみなされます。Behavior見出しの下のNonnormalチェックボックスを有効にすると、直交投影は必要なくなり、リンクはコネクタートレランスによってのみ検出されます。結果は、find nearest nodeオプションを選択した場合と全く同じになります。
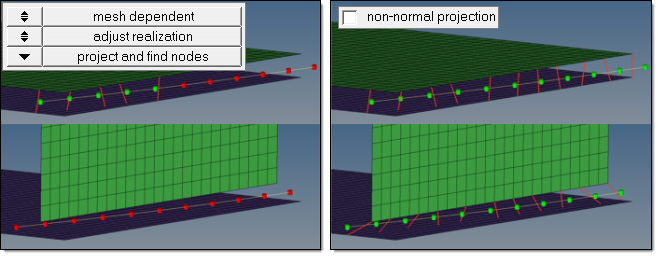
図 5. - ensure projection
- リアライゼーションのための最低条件は、投影可能なことです。リアライゼーションは、1つのプロジェクションポイントから次に向かう方向に実行されます。プロジェクションポイントがシェルの節点と一致する場合、それらは重複節点として整合されます。
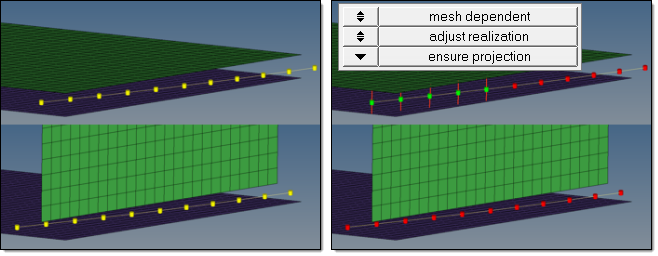
図 6.
- Nonnormalチェックボックスを有効にした場合、リアライゼーションは、1つの投影ポイントから次のポイントへと実行されます。
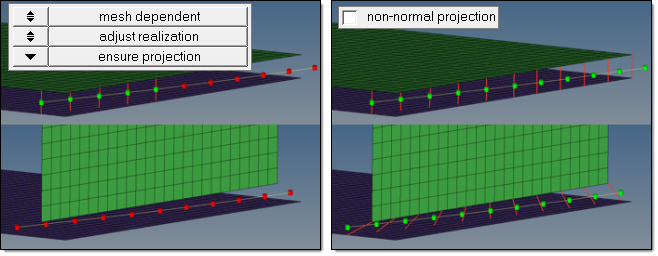
図 7.
-
ステップ3でquad transitionを選択した場合、インプリントするか、インプリントをスキップするかを選択する必要があります。
- imprint
- 四角形要素の移行を伴うメッシュ依存のリアライゼーション作成時、複数のコネクターセットのそれぞれの間隔が近すぎる場合、四角形要素の移行メッシュが重なり合ったり、互いに緩衝し合ったりすることがあります。インプリントは、このような移行を相互に調整し、結果に一致するようにベースのメッシュを修正します。これにより、シームレスで適切なメッシュが得られます。
- Resolve Conflictsオプションは、デフォルトで有効になっており、コネクターをリアライズしたときに、より小さなインプリントの矛盾を自動的に解決できるようにします。重なり合う要素領域に対するリメッシュが実行されます。ただし、これは重なり合う領域が要素の移行サイズの半分より小さい場合に限られます。

図 8. - skip imprint
- 四角形要素移行のための最後のステップが実行されるのを回避します。その代わり、要素パターンを含むコンポーネント^conn_imprintが作成されます。これらの要素はConnector Imprintパネルを使用して、後で手動でインプリントして修正することができます。
- Imprintを実行しないことにより、矛盾したポイントが作成されるなどの自動インプリントのエラーが発生する非常に複雑な領域に対し、ユーザーはメッシュに依存したリアライゼーションを実行することが可能になります。
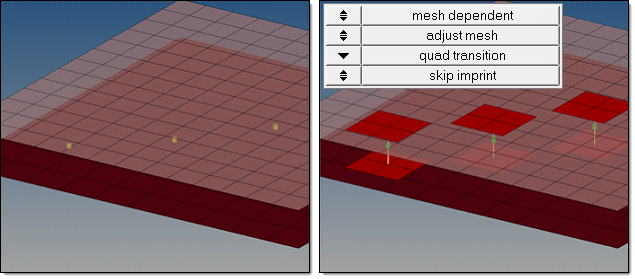
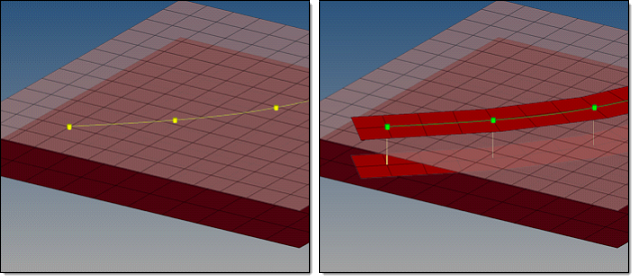
図 9.