Interface with MotionSolve
The user written tire model is interfaced with MotionSolve using the Altair User tire interface.
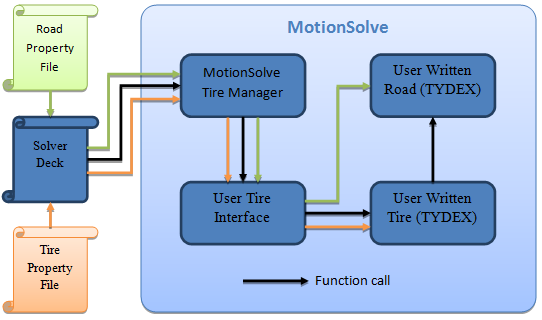
Figure 1.
- The MotionSolve solver deck passes a tire property file and a road property file to the MotionSolve Tire Manager.
- The MotionSolve Tire manager parses the tire property file
to look for the ‘MODEL’ block where it reads the attribute ‘PROPERTY_FILE_FORMAT’. The
tire property file will have a MODEL block that would looks similar to the example
below:
[MODEL] PROPERTY_FILE_FORMAT = ‘USER’ FUNCTION_NAME = '<library_name>::<function_name>' - If the ‘PROPERTY_FILE_FORMAT’ is ‘USER’, then the User tire interface is triggered. The only exception to this is when <library_name>=”tnodelft”, in which case the TNO tire is triggered.
- Once the User tire interface is triggered, the FUNCTION_NAME attribute is read. The <library_name> here is the name of the dynamic library (without the file extension) where the user written TYDEX function is built into.
- The <function_name> is the TYDEX tire function name that is present in the dynamic library <library_name>.
- Once this is established, the User tire interface will call the user written tire model many times during the course of the simulation passing in the information as described by the TYDEX format.
- The user written tire model is responsible for calling into the TYDEX road function.