Use the Outputs tool to create a result output request to the solver, which writes
out the requested data for plotting data.
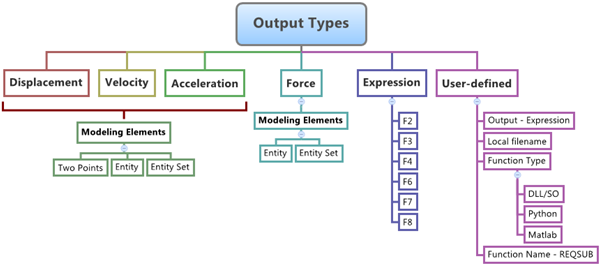
The Output entity creates a Result Output Request to the solver which writes out the
requested data for plotting. The main types of output requests are shown in the
figure below: Figure 1.