最小化质量
最小化质量是多个优化目标之一,适用于拓扑优化、厚度优化和点阵优化。
为拓扑优化最小化质量
运行拓扑优化时,将设计空间的质量最小化将会生成一个重量最轻但仍可承受所施加载荷的形状。如果选择最小化质量作为优化目标,则需要指定以下一项或多项:
- 应力约束 — 通过运行优化窗口施加,并根据安全系数指定。
- 频率约束 — 通过运行优化窗口施加。
- 位移约束 — 通过位移约束工具施加。注: 优化完成后,将“形状浏览器”中的拓扑滑块拖动至最右端,即可获得质量最小化的最佳结果。
为厚度优化最小化质量
运行厚度优化时,将某个设计空间的质量最小化就是更改零件的厚度,从而最小化质量。如果选择最小化质量作为优化目标,则需要指定以下一项或多项:
- 应力约束 — 通过运行优化窗口施加,并根据安全系数指定。
- 位移约束 — 通过位移约束工具施加。
- 频率约束 — 通过运行优化窗口施加。
为点阵优化最小化刚度
运行点阵优化时,将设计空间的质量最小化将会生成一个重量最轻但仍可承受所施加载荷的形状。如果选择最小化质量作为优化目标,则需要指定以下一项或多项:
- 点阵 — 通过运行优化窗口施加。
- 应力约束 — 通过运行优化窗口施加,并根据安全系数指定。
- 频率约束 — 通过运行优化窗口施加。
- 位移约束 — 通过位移约束工具施加。
示例 1:根据应力约束最小化质量
如下图所示,根据最小安全系数中定义的应力约束进行质量最小化,从而对摩托车支架进行优化。随着安全系数增大,需要添加更多的材料来抵抗所施加的载荷。
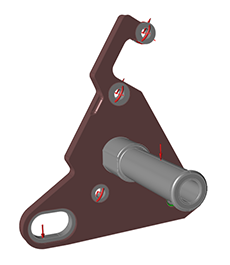
图 1. 初始模型
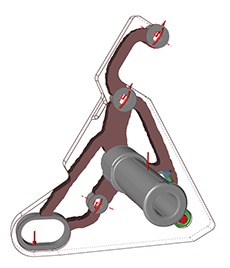 图 2. 安全系数为 1.2 的应力约束
图 2. 安全系数为 1.2 的应力约束
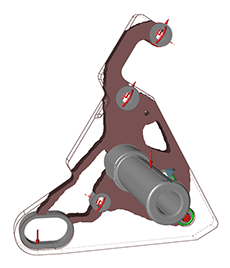 图 3. 安全系数为 2.0 的应力约束
图 3. 安全系数为 2.0 的应力约束
图 1. 初始模型
图 2. 安全系数为 1.2 的应力约束图 3. 安全系数为 2.0 的应力约束示例 2:根据应力和位移约束最小化质量
施加位移约束可以限制模型中某个特定的点从最初的位置偏移特定的距离。如下图所示,除了应力约束外,摩托车支架的脚踏上还施加了位移约束。随着脚踏上所允许的位移不断下降,优化后的形状需要更多材料才能抵抗偏移。
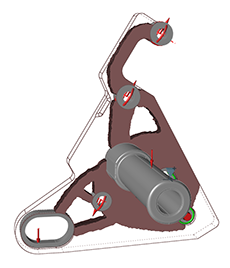
图 4. 脚踏的位移约束为 2 mm
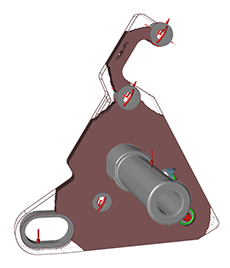 图 5. 脚踏的位移约束为 1 mm
图 5. 脚踏的位移约束为 1 mm
图 4. 脚踏的位移约束为 2 mm
图 5. 脚踏的位移约束为 1 mm注: 使用位移约束时,建议同时施加应力约束。如果单独使用,位移约束可能会对优化造成影响,导致各区域分离,如下列第一幅图所示:
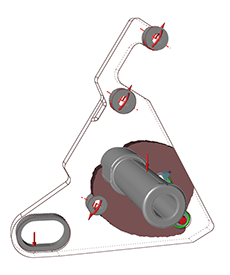 图 6. 脚踏上 2 mm 的位移约束,无应力约束图 7. 脚踏上 2 mm 的位移约束,带应力约束
图 6. 脚踏上 2 mm 的位移约束,无应力约束图 7. 脚踏上 2 mm 的位移约束,带应力约束