The Riemann problem can be defined as a category of initial value problems that
involve a conservation equation and a piecewise data set with a single
discontinuity.
In terms of SPH, you can solve a Riemann problem for each pair of particles, yielding
a more isotropic particle distribution and smoother gradients in the solution. The
following depiction is based on the work of bibliography_r.htm#bibliography_r__bibliography_r_fn_ich_hmc_4gb. Given the Riemann problem definition, you start off
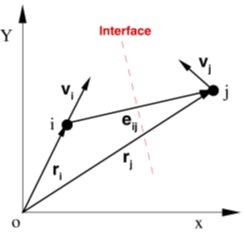
by constructing a unit vector between two particles and .
The two particles can then be assumed to be the “left” and “right” sides of the
Riemann problem, such that the physical values of density (), velocity () and pressure () are expressed as:(1)
The discontinuity is assumed to be located at the interface (Figure 1), half
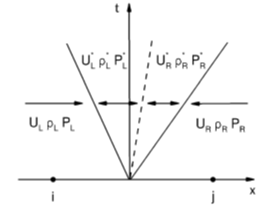
way between the particles. Assuming that particles are moving with arbitrary
velocity vectors, the consequent solution of their motion is either a rarefaction or
compression wave. However, there is a third wave solution at the interface denoted
with * exponent, where and , as indicated by the dashed link in Figure 2. Figure 2. Simplified Riemann Problem Solution in Time. This example shows three possible waves.bibliography_r.htm#bibliography_r__bibliography_r_fn_ich_hmc_4gb
From these basic assumptions, you can derive the and values as:(2)
(3)
Where, the index denotes the mean value of the respective value
between the two particles.
With these two solutions to the Riemann problem, you can modify the continuity
equation and the pressure gradient term in the momentum equation as
follows:(4)
Where, .
It is well-known that 1st order Riemann solvers such as the one illustrated here are
dissipative. To that extent, nanoFluidX is using a limiter so that
the Riemann solutions are provided only when the fluid is under compression. This
effectively reduces the dissipation and has been shown to improve the results in
various situations. bibliography_r.htm#bibliography_r__bibliography_r_fn_ich_hmc_4gb
Note: Although the Riemann solver option is
experimental, canonical test cases, simple geometries, and problems involving
single phase runs such as tank sloshing or water management should still greatly
benefit from the new formulation. However, industrial gearboxes and violent
multiphase flows in complex moving geometries in general are likely to
experience local instabilities. This will be addressed in the coming versions of
nanoFluidX.
Density filtering is an integral part of the Riemann solver implementation. In SPH
simulation, the consistency between mass, density, and occupied area cannot be
strictly enforced. Several density filtering schemes have been developed to tackle
this. In nanoFluidX, two versions are implemented:
INCREMENTAL and INSTANT filtering.
INSTANT
The instant density filtering is basically a 0th-order Shepard filter.
At each evaluation point (according to the number set by
RM_freq_rho_init), the density is re-calculated
by:(5)
Where,
Is the density of particle I.
and
Is the mass and volume of particle j respectively
Is the weight calculated from the kernel function.
INCREMENTAL
A modified 1st-order density filtering scheme is used as an additional
option. The operator is calculated following:(6)
Where, is the density from solving the
continuity equation before applying the filter.