MV-8001: Path and Velocity Following
In this tutorial, you will learn how to define a path and velocity or acceleration profile, set up a feedforward steering controller to follow a path, and set up a feedforward traction controller to follow a velocity or acceleration profile.
- Feedforward Controllers
- In a feed-forward system, the control variable adjustment is not error-based. Instead it is based on knowledge about the process in the form of a mathematical model of the process and knowledge about or measurements of the process disturbances.
- Defining a path for the driver
- Multiple methods can be used to provide the desired path:
- Table of centerline points
- Path is provided as a table of equally spaced cartesian
coordinates of centerline points. These points are provided
in a separate file, DDF or Driver Demand File.
$Example DDF [ALTAIR_HEADER] FILE_TYPE = 'DDF' FILE_VERSION = 1.0 FILE_FORMAT = 'ASCII' $---------------------------------------------------UNITS [UNITS] (BASE) {length force angle mass time} 'm' 'newton' 'degrees' 'kg' 'sec' $---------------------------------DEMAND_VECTORS [DEMAND_VECTORS] {X Y Z} 0 0 0 -4 0 0 -1 0 0 -2 0 0 -5 0 0 -3 0 0 -
 Figure 1.
Figure 1. - Sequence of straights and arcs
- Path is provided as a table of straights and circular section.
-
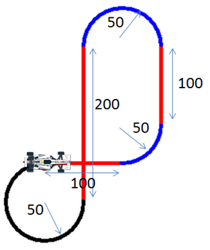 Figure 2.
Figure 2. - Predefined path
- Path is one of the predefined paths visualization (Constant Radius, Single lane change, Double lane change, and Slalom).
-
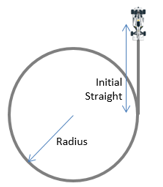 Figure 3.
Figure 3.
- Defining a velocity or acceleration profile for the driver
- Demand velocity or acceleration profile is similar to open loop signal explained in tutorial 1. All methods – constant, expression and curve are valid for demand signal definition as well.
Assemble the Vehicle
In this step, you will assemble the vehicle using the Assembly Wizard.
-
Ensure the MBD-Vehicle Dynamics Tools preference file loaded is for all of the
MotionView functionality of the Advanced Driver
to work properly.
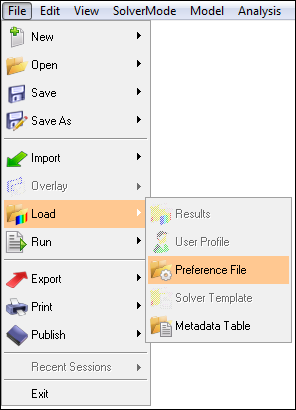 Figure 4.
Figure 4.  Figure 5.
Figure 5. -
From the menu bar, select .
In Script an Open Loop Acceleration Event, a linear torque map powertrain will be used to avoid the complexity of adding controllers for gear and clutch.
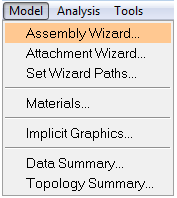 Figure 6.
Figure 6. -
Select the Full vehicle with advanced driver
option.
This takes care of all the dependencies of the advanced driver.
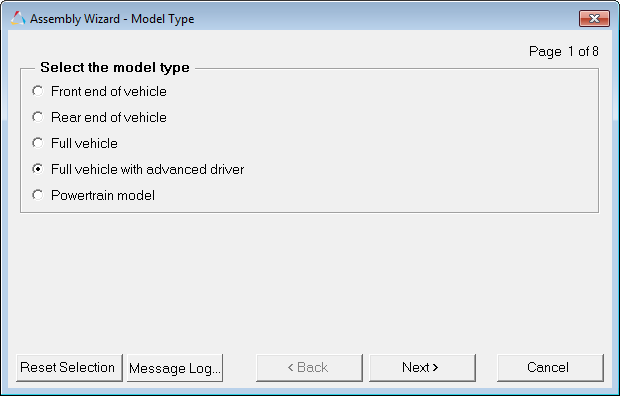 Figure 7.
Figure 7.
Add Driver Analysis
In this step, you will use the Task Wizard to load the driver analysis.
-
From the menu bar, select .
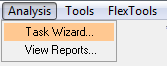 Figure 8.
Figure 8. -
Select AltairDriverFile from the Type drop-down
menu.
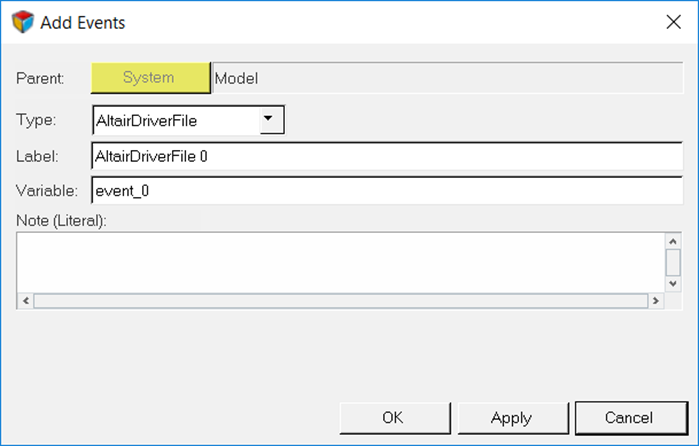
Figure 9.Tip:Selecting
 (Altair Driver
icon) will open up the Altair Driver panel.
This automatically resolves all of the vehicle attachments for the
Altair Driver.
(Altair Driver
icon) will open up the Altair Driver panel.
This automatically resolves all of the vehicle attachments for the
Altair Driver.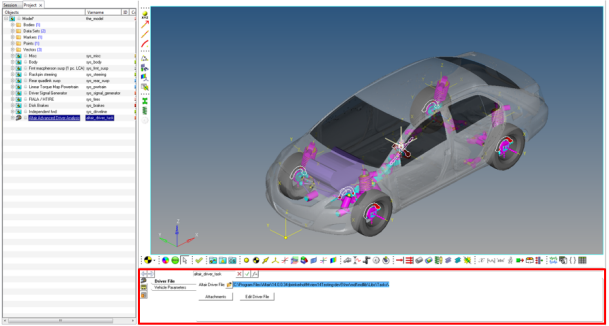 Figure 10.
Figure 10. Selecting the AltairDriverFile 0 will open up the driver event panel. Selecting the Event Editor button will open the Altair Driver File dialog.
Specify Vehicle Parameters
In this step, you will specify parameters for the vehicle.
Write an Altair Driver File Driving Event
In this step, you will create a constant radius with constant velocity event, a straight line acceleration event, and a path as a table of cartesian coordinates of centerline points event.
Constant Radius with Constant Velocity Event
-
Click
 to run the simulation.
to run the simulation.
Straight Line Acceleration Event
In this step, you will create an event to follow a straight line while accelerating the vehicle constantly with 2 m/s2.
-
Click to run the simulation.
Path as a Table of Cartesian Coordinates of Centerline Points Event
In this step, you will give a path as a table of Cartesian coordinated of centerline points and define the velocity profile along the path.