RD-V: 0100 Impact Momentum
A block impacts a plate and the system is compared to theory.
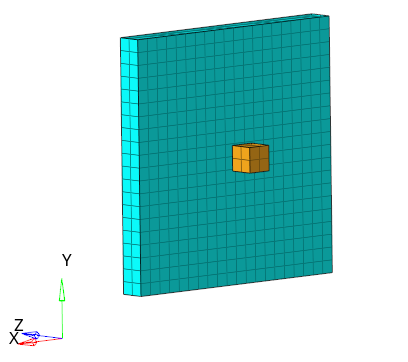
Figure 1.
The impact algorithm is studied by impacting a square plate with a cube. The system momentum after impact is compared to the theoretical system momentum. The time history output of each part and the total system is used.
Options and Keywords Used
- /INTER/TYPE7
- /INTER/TYPE24
- /INTER/TYPE25
Input Files
The following input file is used in this verification problem:
<install_directory>/hwsolvers/demos/radioss/verification/contact/0100_impact/
Model Description
The plate is 254 mm square and 25.4 mm thick. The cube length is 25.4mm. The parts are modeled using solid elements and linear elastic material. An initial velocity of 5080 mm/s is applied to the block in the z direction. There are no other constraints in the model.
Simulation Iterations
Three different contact interfaces, /INTER/TYPE7, INTER/TYPE24, and /INTER/TYPE25 are tested to model the impact between the plate and the block. A surface to surface contact is defined for all interfaces. TYPE7 requires two different contact interface definitions in the model whereas TYPE24 and TYPE25 can define surface to surface contact using one definition.
The following system is used: mm, s, Mg.
Results
The global momentum can be plotted from the time history output. Figure 2 shows that the global z momentum for all interface models exactly matches the theoretical momentum of 0.6452 .
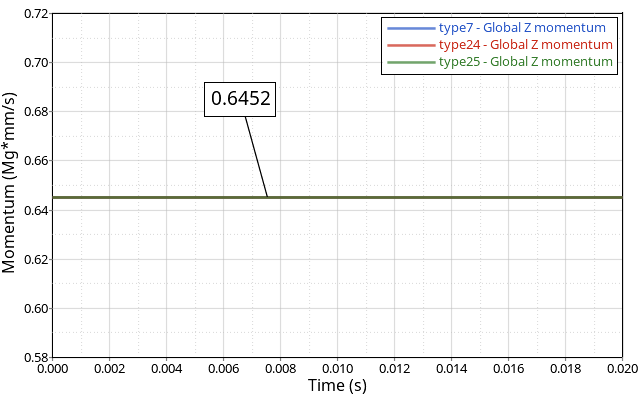
Figure 2. Global model Z momentum
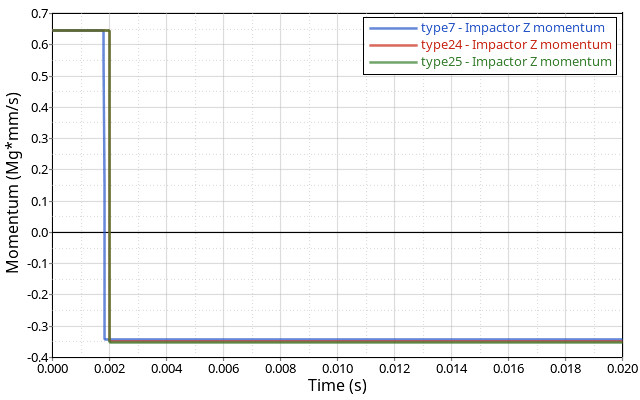
Figure 3. Impactor Z momentum
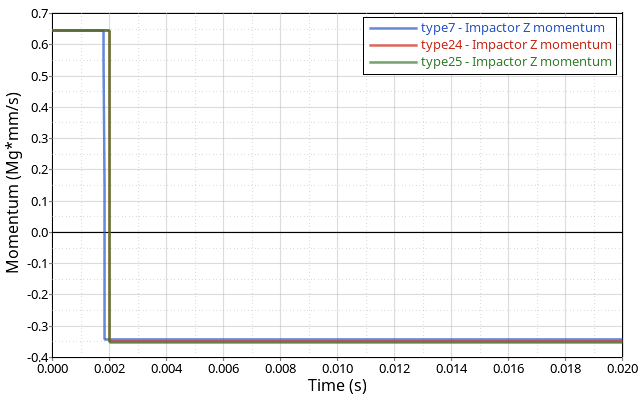
Figure 4. Plate Z momentum
Conclusion
The global z momentum in the model exactly matches the theoretical momentum of 0.6452 Mg*mm/s.