HV-3035: HyperViewを用いた結果のポスト処理
複素結果をポスト処理する方法について学習します。
HyperViewでは複素結果がサポートされており、Modal Animation Mode![]() を使ってアニメーション表示することが可能です。アニメーションモードからモーダルに切り替えると、Contourパネル内に追加のオプションが表示され、ユーザーはそこでComplexフィルタを設定することができます。
を使ってアニメーション表示することが可能です。アニメーションモードからモーダルに切り替えると、Contourパネル内に追加のオプションが表示され、ユーザーはそこでComplexフィルタを設定することができます。
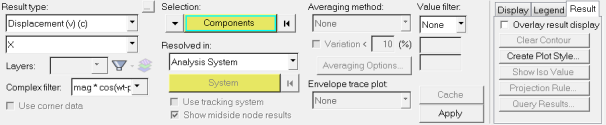 図 1.
図 1. - mag*cos(ωt-phase)
- 角度またはωt(単位=度)が変化する応答
- mag
- 複素結果の大きさ(r)
- phase
- 複素数の位相

- real
- 複素数の実数部(x)
- imaginary
- 複素数の虚数部(y)
複素結果は、Result type listで結果名に(c)のついたかたちで表示されます。Contourパネル内のその他の選択肢は、複素結果の場合も複素結果以外の場合も同じです。
ある角度における複素応答のコンターを見るには、Animation Controlsアイコン![]() を使用します。Animation Controlsパネル内で、Current angle入力欄を使って、角度の値を入力します。
を使用します。Animation Controlsパネル内で、Current angle入力欄を使って、角度の値を入力します。
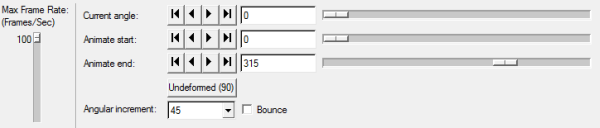 図 2.
図 2. また、Animation Controlsパネル内で、Angular Incrementを設定することも可能です。これは、モデルをアニメーション表示する際に使用されます(上の画像を参照)。アニメーションを開始するには、Start/Pause Animationボタン![]() をクリックします。
をクリックします。
本演習は、複素結果のポスト処理がHyperViewでどのように行われるかの例です。使用されるモデルは4つの荷重ケースを含みます。1つ目の荷重ケースには、静的結果が含まれます。2つ目の荷重ケースは、除荷構造にモデルをリセットし、固有振動数が抽出される荷重ケース3に使用されるベースの状態です。荷重ケース4では、節点(ID10000)内のベアリングの動的載荷によるクリップ上の質量要素(要素ID 999)の応答が解析されます。モデルは節点9999で6つの自由度全てで固定されています。
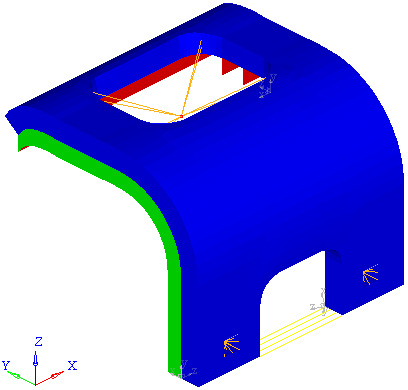 図 3.
図 3. モデルのHyperViewへのインポートとアニメーションモードのモーダルへの設定
-
Page Controlsツールバー上のPage Window Layoutアイコン横にある矢印
 をクリックし、ウィンドウ3つのレイアウト
をクリックし、ウィンドウ3つのレイアウト を選択します。
を選択します。
- メインメニューからを選択し、Load Modelパネルに入ります。
- animationフォルダーにあるモデルファイルPostprocessing_demo.inpと結果ファイルPostprocessing_demo.odbを読み込みます。
- 左側のウィンドウがアクティブウィンドウとなっている(青緑の枠で囲まれている)ことを確認します。
- Applyをクリックし、モデルと結果をHyperViewに読み込みます。
-
Animation Mode Menuアイコンの横にある下向きの矢印
 をクリックし、 Set Modal Animation Mode
をクリックし、 Set Modal Animation Mode を選択します。
を選択します。
荷重ケースを荷重ケース4に設定し、モデルをコンター表示
-
ResultsブラウザからChange load caseドロップダウンメニューを使って、荷重ケースをStep-4に設定します。
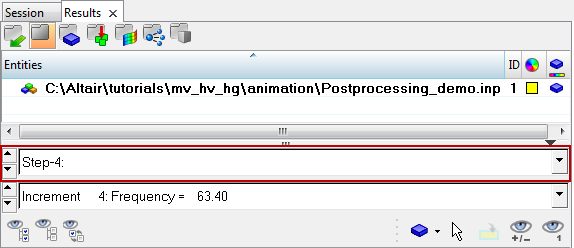 図 4. 注: Change load caseツールバーは、Configure Browserオプション(Resultsブラウザのコンテキストメニュー内にある)を使って表示をオン・オフ切り替えできます。
図 4. 注: Change load caseツールバーは、Configure Browserオプション(Resultsブラウザのコンテキストメニュー内にある)を使って表示をオン・オフ切り替えできます。 -
ResultツールバーのContourパネルボタン
 をクリックしてContourパネルに入ります。
をクリックしてContourパネルに入ります。
-
Complex filter欄はアクティブになっています。ドロップダウンメニューをクリックしてrealを選択し、速度の実数成分を全体Z方向としてモデルをコンター表示します。
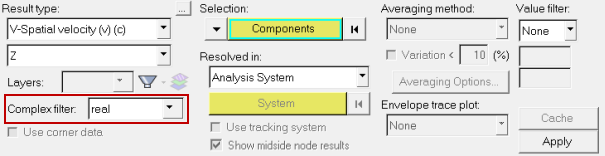 図 5.
図 5. -
Applyをクリックします。
 図 6.
図 6.
アニメーションパラメータの設定とモデルのアニメーション表示
-
Animation Controlsボタン
 をクリックします。
このパネルでは、ユーザーがアニメーションのCurrent angleとAngular Incrementを設定することが可能です。
をクリックします。
このパネルでは、ユーザーがアニメーションのCurrent angleとAngular Incrementを設定することが可能です。 -
Start/Pause Animationボタン
 をクリックして、アニメーションを開始します。
をクリックして、アニメーションを開始します。
-
Start/Pause Animationボタン
 をクリックして、アニメーションを停止/一時停止します。
をクリックして、アニメーションを停止/一時停止します。
節点999における節点値のメジャーを作成し、値をプロッティング
-
Annotationツールバー上のMeasureパネルボタン
 をクリックし、Measureパネルに入ります。
をクリックし、Measureパネルに入ります。
-
Live linkオプションをアクティブにします。
Live linkオプションは、Measureパネル上でなされた選択とカーブとのリンクを作成します。ライブメジャー項目が削除されると、カーブをキープするか削除するかを問うメッセージが表示されます。
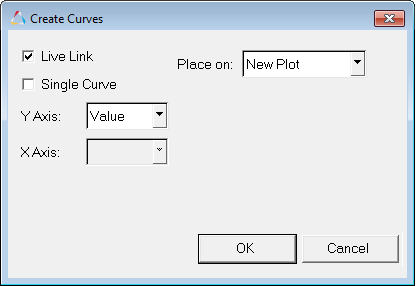 図 7.
図 7. -
OKをクリックします。これで2番目のウィンドウにカーブが作成されます。X軸は位相角(単位は度)、Y軸はメジャーの値です。
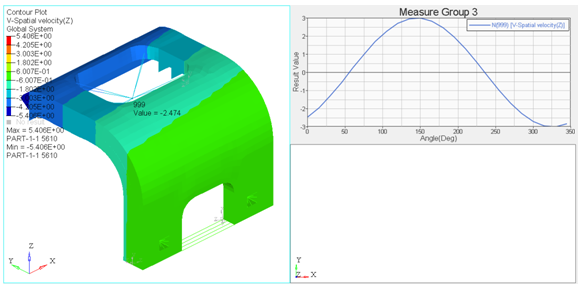 図 8. HyperViewでこのプロットの作成に使用される定式は:
図 8. HyperViewでこのプロットの作成に使用される定式は:real*cos(wt)+imaginary*sin(wt)すべてのポストプロセッサがこの式を使用するわけではありません。他のポストプロセッサで使用され得る式として挙げられるのは:real*cos(wt)-imaginary*sin(wt)これらの式には微妙な違いがあります。次に、この2つ目の式を同じプロット上にメジャーカーブとしてプロットし、2つの違いが単に位相の横移動であることを示します。
-
CurvesツールバーでDefine Curvesパネルボタン
 をクリックし、Define Curvesパネルに入ります。
をクリックし、Define Curvesパネルに入ります。
-
Applyをクリックします。
注: 位相の横移動を除くと、カーブは全く同じです。
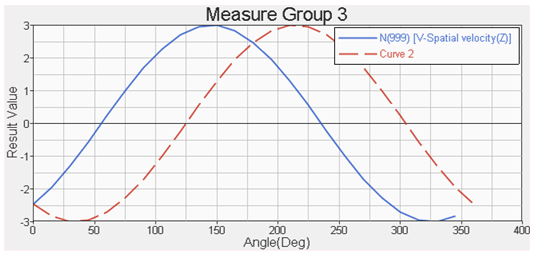 図 9.
図 9.
時刻歴速度値の複素プロットの作成
-
プロットタイプをComplexに設定します(下の図を参照)。
 図 10.
図 10. -
Curvesツールバー上のBuild Plotsアイコン
 をクリックします。
をクリックします。
-
Data fileにオープンファイルアイコン
 をクリックし、ファイルPostprocessing_demo.odbを選択します。
をクリックし、ファイルPostprocessing_demo.odbを選択します。
-
以下の選択を行います:
- Y-TypeにV3-Spatial velocity (Time History)を選択
- Y-RequestにNode 999を選択
- Y-ComponentにValueを選択
 図 11.
図 11. -
Applyをクリックします。
これで、Magnitudeが下部、Phaseが上部の複素プロットが作成されます。
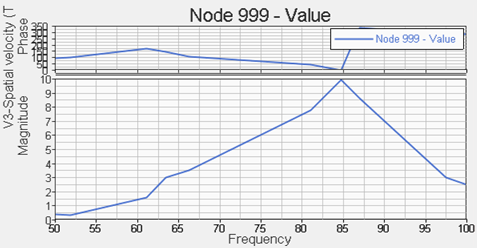 図 12.
図 12. -
3つ目のウィンドウ内をクリックし、Switch to Real/Imaginaryを選択します。
これで、Realコンポーネントが上部に、Imaginaryが下部にプロットされるよう、プロットが更新されます。
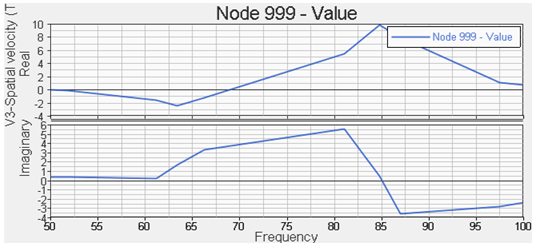 図 13.
図 13.