|
»Click here to display Table of Contents«
|

M00 File Description |

|

|

|

|
|
M00 File Description |
|
|
|

|
|
»Click here to display Table of Contents«
|
M00 File Description |
|
|
|
|
|
M00 File Description |
|
|
|
|
The M00 file is a file which contains the information which does not exist in the D00 (RADIOSS Block Format only).
The keywords described here are:
| • | DUMMY_POS |
| • | BELT_GEN |
/DUMMY_POS/Id/Title
Where: |
|
Type |
Unit |
||
|
Is a keyword |
Keyword |
No |
||
|
Is the identifier number of the dummy |
Integer |
No |
||
|
Is the name of the dummy, name displayed in the Safety page. |
String |
No |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Subset |
Grnod |
|
|
|
|
|
|
|
|
||||||||
Where: |
|
Type |
Unit |
||||||||||||||
|
is the identifier number of a subset defined in the associated D00 file, and corresponding to the Dummy. |
Integer |
No |
||||||||||||||
|
is the identifier number of a node group defined in the associated D00 file. |
Integer |
No |
||||||||||||||
|
|
|
|||||||||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|---|---|---|---|---|---|---|---|---|---|
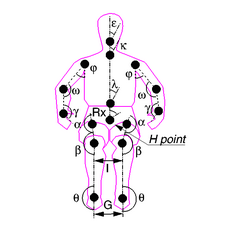
Hx |
Hy |
Hz |
|
|
|
|
|||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|---|---|---|---|---|---|---|---|---|---|
Rx |
Ry |
Rz |
|
|
|
|
|||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|---|---|---|---|---|---|---|---|---|---|
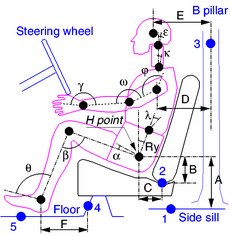
Side sill (point 1) |
Hinge_x (point 2) |
Hinge_z (point 2) |
|
|
|
|
|||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|---|---|---|---|---|---|---|---|---|---|
B-pillar (point 3) |
Bracket (point 4) |
Floor (point 5) |
|
|
|
|
|||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|---|---|---|---|---|---|---|---|---|---|
A |
B |
C |
D |
|
|
||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|---|---|---|---|---|---|---|---|---|---|
E |
F |
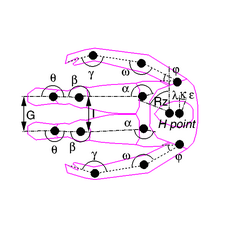
G |
I |
|
|
||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|---|---|---|---|---|---|---|---|---|---|
Left_alpha_x |
Left_alpha_y |
Left_alpha_z |
|
|
|
|
|||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|---|---|---|---|---|---|---|---|---|---|
Left_beta_x |
Left_beta_y |
Left_beta_z |
|
|
|
|
|||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|---|---|---|---|---|---|---|---|---|---|
Left_theta_x |
Left_theta_y |
Left_theta_z |
|
|
|
|
|||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|---|---|---|---|---|---|---|---|---|---|
Right_alpha_x |
Right_alpha_y |
Right_alpha_z |
|
|
|
|
|||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|---|---|---|---|---|---|---|---|---|---|
Right_beta_x |
Right_beta_y |
Right_beta_z |
|
|
|
|
|||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|---|---|---|---|---|---|---|---|---|---|
Right_theta_x |
Right_theta_y |
Right_theta_z |
|
|
|
|
|||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|---|---|---|---|---|---|---|---|---|---|
Left_phi_x |
Left_phi_y |
Left_phi_z |
|
|
|
|
|||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|---|---|---|---|---|---|---|---|---|---|
Left_omega_x |
Left_omega_y |
Left_omega_z |
|
|
|
|
|||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|---|---|---|---|---|---|---|---|---|---|
Left_gamma_x |
Left_gamma_y |
Left_gamma_z |
|
|
|
|
|||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|---|---|---|---|---|---|---|---|---|---|
Right_phi_x |
Right_phi_y |
Right_phi_z |
|
|
|
|
|||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|---|---|---|---|---|---|---|---|---|---|
Right_omega_x |
Right_omega_y |
Right_omega_z |
|
|
|
|
|||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|---|---|---|---|---|---|---|---|---|---|
Right_gamma_x |
Right_gamma_y |
Right_gamma_z |
|
|
|
|
|||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|---|---|---|---|---|---|---|---|---|---|
Kappa_x |
Kappa_y |
Kappa_z |
|
|
|
|
|||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|---|---|---|---|---|---|---|---|---|---|
Lambda_x |
Lambda_y |
Lambda_z |
|
|
|
|
|||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|---|---|---|---|---|---|---|---|---|---|
Eta_x |
Eta_y |
Eta_z |
|
|
|
|
|||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|---|---|---|---|---|---|---|---|---|---|
Angle_11 |
Angle_12 |
Angle_13 |
|
|
|
|
|||
Angle_21 |
Angle_22 |
Angle_23 |
|
|
|
|
|||
Angle_31 |
Angle_32 |
Angle_33 |
|
|
|
|
|||