Viewing the Results
View and post-process the results in POSTFEKO.
For the first solver run, the full calculation needs to be
performed. The static domain solution is stored to file and then re-used in subsequent
solver iterations. By storing the solution to the static domain (for this example the
waveguide), the Solver only
needs to calculate the effect of the feed pin location in subsequent
iterations.
-
View the reflection coefficient for each feed position on a Smith chart.
-
The port is optimally matched when the magnitude of the reflection
coefficient is as small as possible or the input impedance is equal to
50 Ω. This condition is roughly met at
iteration 6, see Figure 1. This corresponds to a feed position given by
(1) 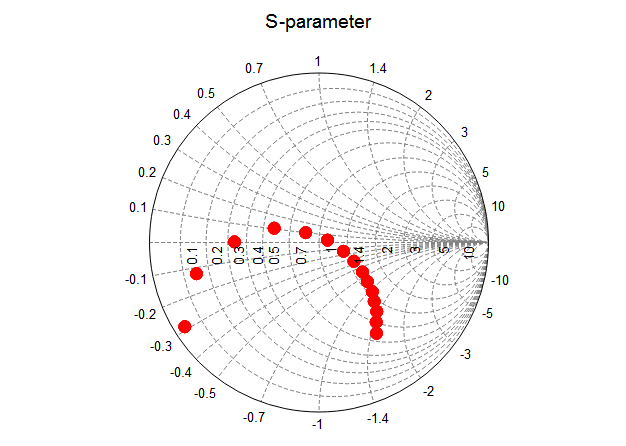
Figure 1. Smith chart showing the reflection coefficient for each feed pin position.Tip: The above graph can be generated by keeping the temporary optimisation files and adding the source data from each model.
-
The port is optimally matched when the magnitude of the reflection
coefficient is as small as possible or the input impedance is equal to
50 Ω. This condition is roughly met at
iteration 6, see Figure 1. This corresponds to a feed position given by