チュートリアル:モーションジョイントカプラー
ジョイントペアにカプラーを追加し、カプラーの向きを反転し、モーション解析を実行して結果をプロットします。
このレッスンでは、以下のことを学習します。
- ジョイントペアにカプラーを追加する
- ジョイントカプラーの向きを反転する
- モーション解析を実行して結果をプロットする
Inspireモデルを開く
-
Motionフォルダ内のM08_SpurGearset.stmodファイルをダブルクリックしてモデリングウィンドウにロードします。

モーション解析を実行する
-
モーション解析ツールにあるクイックランボタンをクリックしてモデルのモーションを確認し、最後まで実行します。
解析の実行が停止した後に、
 アイコンが表示され、自動的にレビューモードに切り替わります。
アイコンが表示され、自動的にレビューモードに切り替わります。
-
アニメーションツールバーにある再生ボタンをクリックして結果をレビューします。

注: このモデルのモーション解析を最初に実行するとき、モーターはTumbler Gearアセンブリを駆動しています。他のギアで見られる回転はいずれも、ボディ重心で作用する重力の影響によるものです。次のステップでは、ジョイントカプラーを追加してからの様子を確認します。 -
モーション結果のレビューアイコンをクリックするか、ダブル右クリックしてレビューモードを抜けます。

モデルにカプラーを追加する
-
結合グループからカプラーツールを選択します。

-
ガイドバーの
 ボタンをクリックします。
ジョイントカプラーが2つ作成されます。
ボタンをクリックします。
ジョイントカプラーが2つ作成されます。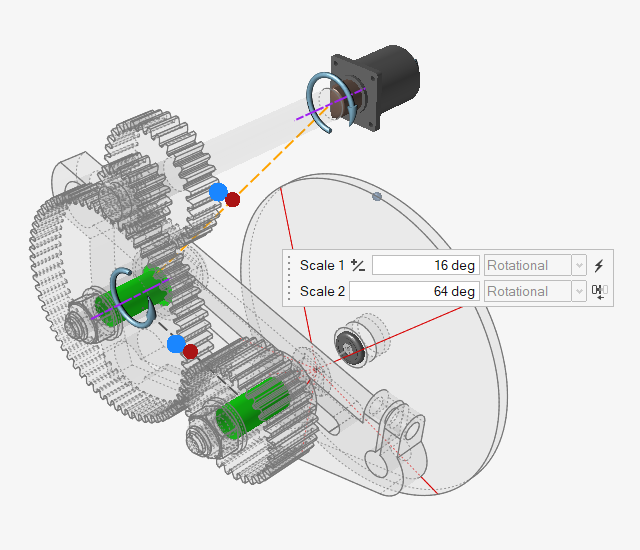
-
マイクロダイアログで、スケールファクタをメモします。ソフトウェアでは、ギアの歯数から自動的に比率が抽出されました。このフィーチャーはガイドバーのフリージョイント位置オプションを使用する際にのみ使用できます。

-
モデリングウィンドウまたはモデルブラウザで、32:64ギア比率のもう一方カプラーを選択し、スケールファクタをメモします。

ジョイントカプラーについて2番目のモーション解析を実行する
-
モーション解析ツールにあるクイックランボタンをクリックします。
警告メッセージが表示され、カプラーは、剛体となるジョイントでアクティブでなければなりません、と通知されます。
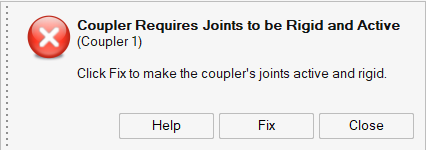
-
修正ボタンをクリックして、カプラーのジョイントを剛体およびアクティブにします。
注: このエラーメッセージを表示されないようにするには、カプラーガイドバーの
 アイコンをクリックし、カップリングジョイントを剛体に設定を選択します。
アイコンをクリックし、カップリングジョイントを剛体に設定を選択します。 -
クイックランボタンをもう一度クリックしてモデルのモーションを確認し、解析を最後まで実行します。
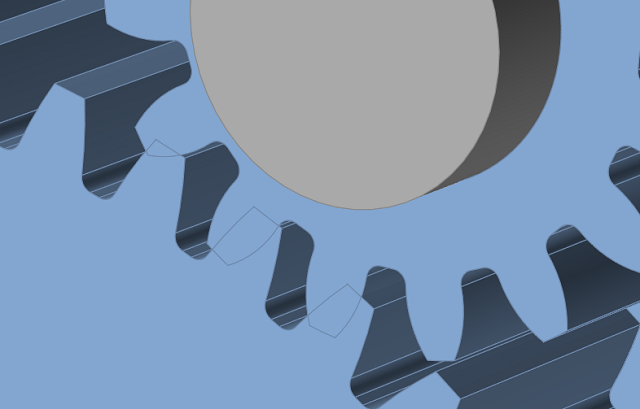
-
モデルをアニメーションして、Tumbler Gearと64t Gear 3/8"のギアの歯が互いに貫通していることを確認します。この状態は正しくありません。ジョイントカプラーの向きを反転して、この状態を修正します。
ジョイントカプラーモーションの向きを反転する
-
カプラーツールを選択します。
-
モデリングウィンドウまたはモデルブラウザでTumbler Gearと64t Gear 3/8"をジョイントするカプラーを選択します。
カプラーは青い円と赤い円のペアで表されます。
-
マイクロダイアログで、
 アイコンをクリックしてジョイントカプラーの向きを反転します。
アイコンをクリックしてジョイントカプラーの向きを反転します。
3番目のモーション解析を実行して、結果をプロットする
-
モーション解析ツールにあるクイックランボタンをクリックしてモデルのモーションを確認し、最後まで実行します。
これでギアの歯は目的どおりに噛み合っています。
-
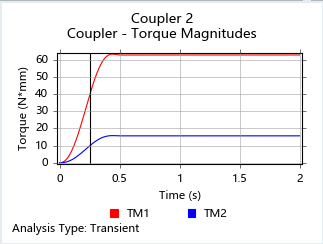
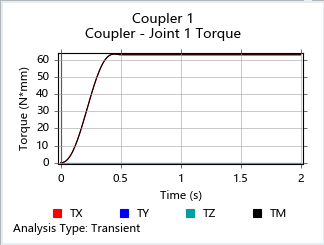
モデルブラウザでカプラー1を選択して結果をプロットします。
デフォルトでは、プロットにはカップリングジョイントのうちの1つのトルクが示されます。次に、カプラーで使用されている両方のジョイントの回転速度を比較します。
-
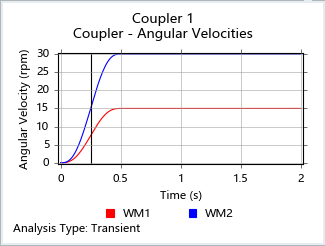
プロットを右クリックし、コンテキストメニューから角速度を選択します。
このプロットから、速度比が2:1であることがわかります。
-
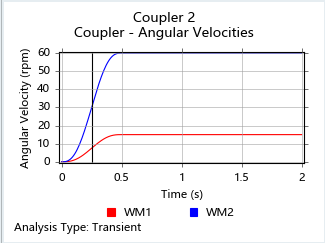
モデルブラウザでカプラー2を選択します。
これで、カプラー2の比率が4:1であるとわかります。
-
プロット上を右クリックし、トルク値を選択します。
トルク値にもカプラ比率が示されます。