MV-1024: Using User Subroutines in MotionSolve Models
In this tutorial, you will learn about the benefits of user subroutines in defining motion.
- To describe a physical phenomenon that is determined by non-trivial logical conditions.
- When it is impractical to formulate a complicated expressions in an explicit form.
- To take full advantage of a programming language like C/C++ or Fortran and simpler programming with interpreters like Tcl, Python, and Ruby.
To use your own subroutines in MotionSolve, follow these steps:
Copy the model file required for this exercise, Pendu_model.mdl, from the mbd_modeling\motionsolve to your <working directory>.
Use an Expression to Define Motion
-
From the Project Browser, right-click on
Model and select (or right-click Motions
 from the toolbar).
from the toolbar).
-
Click Outputs
 to access the Outputs panel.
Review the output request.
to access the Outputs panel.
Review the output request. -
Click Run
 , to access the Run panel.
, to access the Run panel.
-
Click Check
 to check for any modeling errors.
to check for any modeling errors.
Use the MOTSUB User Subroutine to Define Motion
In this step, you will use the user subroutine MOTSUB. This user subroutine has been compiled and linked in the DLL ms_csubdll.dll. This machine level DLL is provided in the HyperWorks installation. For the Windows 64-bit platform, the DLL is located at: <installation_directory>\hwsolvers\motionsolve\usersub\subdll\win64\.
You will use the ms_csubdll.dll as a machine level DLL.
-
Create an environment variable MS_USERSUBDLL and set the value to the DLL
file.
-
Set Variable value to
<installation_directory>\hwsolvers\motionsolve\usersub\subdll\win64\ms_csubdll.dll.

Figure 1.
-
Set Variable value to
<installation_directory>\hwsolvers\motionsolve\usersub\subdll\win64\ms_csubdll.dll.
-
With the Pendu_model.mdl from the previous step open in
the MotionView model window, go to the Motions
panel, .
-
Click the User-Defined tab and enter
USER(100001,5,2) in the
 text-box.
text-box.

Figure 2.Note: To use an element level (specific) DLL/Interpreter function, you can check the Use local dll and function name check-box and point to the DLL using the folder icon, .
.The string
USER(100001,5,2)is used to pass arguments to the MOTSUB user subroutine. The MOTSUB user subroutine calculates motion using the parameters par1 and par2 in USER(branch_id, par1, par2) as follows:motion_val= par1*TIME^par2 -
Click Run
to access the Run panel.
-
Select the file Pendu_model_usersub.h3d using the
Load model folder icon
 .
.
-
Click Apply.
This will overlay the new animation over the existing animation.
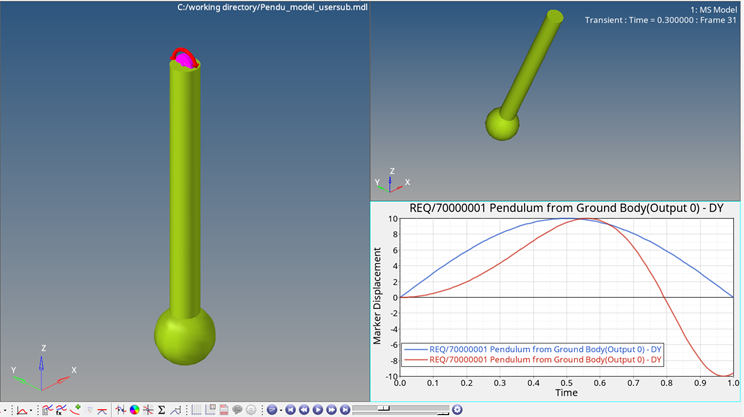
Figure 3.Note: If the value of the usrsub_param_string is set as "USER(3.142, 1)" the results from step 2 will be the same as results from step 1.