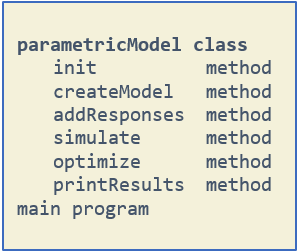
Contains the model design parameter values and the methods for generating a model,
adding responses, performing the optimization, and printing results.
init
Creates an instance of the parametric class.
createModel
Creates a designable model that can be provided to the
optimizer.
addResponses
Adds responses to the designable model. These are used for cost and
constraint definition.
simulate
For debug purposes only. This method will perform a simulation and make
sure the designable model runs without any issues.
optimize
Performs an optimization.
printResults
Prints the results you want to see to the screen and to the log
file.
main
Invokes the various methods to perform a simulation.
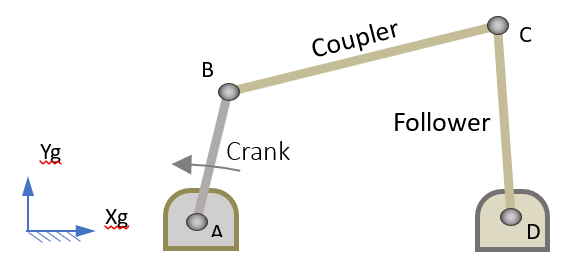
The planar 4-bar mechanism model is defined with four design points: A, B, C, D. Figure 1.
The 4-bar is an RSUR mechanism:
R is at Point A
S is at Point B
U is at Point C
R is at point D
The two revolute joints at A and D are defined with their Z-axes along the global
Z.
The spherical joint at B does not care about orientations.
The universal joint at C is defined as follows:
1st z-axis, zi, along global Z
2nd z-axis, zj, perpendicular to zi and the line from B to C
The entire model is parameterized in terms of these four design points: A, B, C and
D.
Operating in 2D space, this leads to eight design variables: ax, ay, bx, by, cx, cy,
dx and dy.
These eight design variables and their design limits are specified as follows:
DV
Value
(bi, bu)
ax
-45
(-50 ,50 )
ay
+45
(-50 ,50 )
bx
+65
(+20 ,80 )
by
+260
(+180,280)
cx
+300
(+240,380)
cy
+500
(+400,620)
dx
+515
(+180,520)
dy
-85
(-100,20 )
The parametric class will be named FourBar. Here is its abbreviated
definition.