MV-7004: Inverted Pendulum Control Using MotionSolve and MATLAB
In this tutorial, you will learn how to use MotionView and MotionSolve to design a control system that stabilizes an inverted pendulum.
The goal of this tutorial is to design a regulator using the pole placement method. The inverted pendulum MDL model file is supplied.
- Check the stability of the open loop system.
- Export linearized system matrices A,B,C, and D using MotionSolve linear analysis.
- Design a controller using MATLAB.
- Implement a controller in MotionView.
- Check the stability of a closed loop system using MotionSolve linear analysis.
- Add disturbance forces to the model and run simulation using MotionSolve.
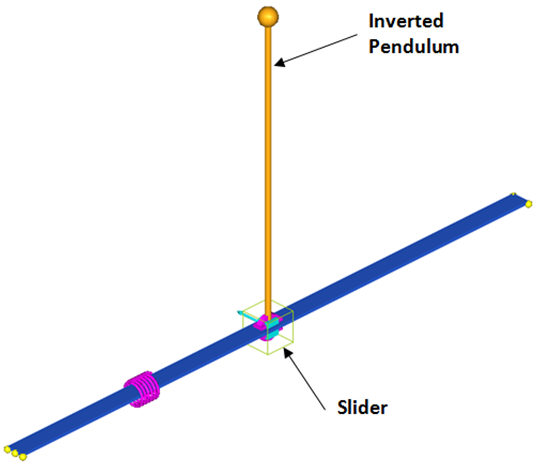
Figure 1. Inverted Pendulum Model
You want to find a full-state feedback control law to achieve the goal. The control input is a force applied to the slider along the global X-axis. Plant output is the pendulum angle of rotation about the global Y-axis.
Start by loading the file inv_pendu.mdl, located in the mbd_modeling\motionsolve folder, into MotionView. Upon examination of the model topology, you will notice that everything needed for this exercise is already included in the model. However, depending on which task you are performing, you will need to activate or deactivate certain entities.
Determine the Stability of the Open Loop Model
Compute the eigenvalues to determine the stability of the Inverted pendulum.
-
From General Actions toolbar, click Run
 .
.
-
From the Results Browser select individual modes.
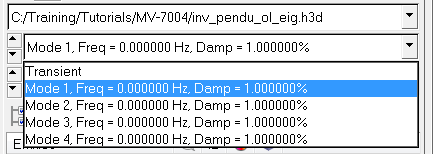
Figure 2. -
Click Start/Pause Animation
 to visualize the mode shape.
to visualize the mode shape.
Obtain a Linearized Model
where , , , and are the state matrices, is the state vector, is the input vector, and is the output vector. The A,B,C,and D matrices depend on the choice of states, inputs, and outputs. The states are chosen automatically by MotionSolve and the chosen states are reported in one of the output files. You only need to define the inputs and outputs.
-
Click Run
.
-
Specify the output filename as
inv_pendu_state_matrices.xml.
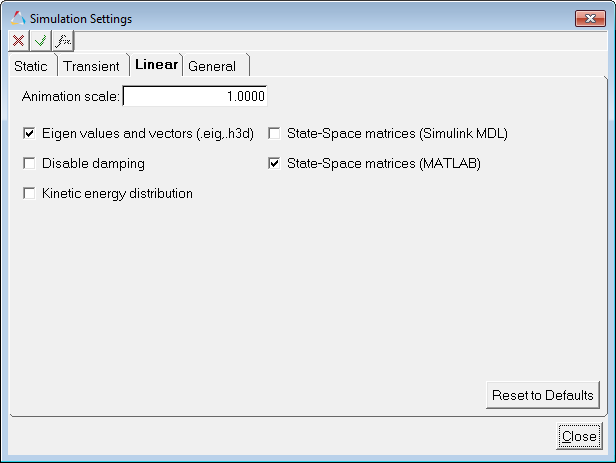
Figure 3. Linear Tab in Simulation Settings Dialog for Specifying the MATLAB Matrix Files Output
Design a Control System in MATLAB
A detailed discussion of control system design is beyond the scope of this document. However, the steps to design a regulator using pole placement [1] to stabilize the inverted pendulum are described briefly. For details, refer to the standard controls text and the MATLAB documentation.
It can be easily verified using MATLAB that the system is completely state controllable [1, 2].
We employ a full-state feedback control law , where is the control input, is the gain vector, and is the state vector. Then, assuming the desired pole
locations are stored in vector , you may use the pole placement method to compute . For desired poles at [-20 -20 -20 -20] (rad/s), the
acker function in MATLAB yields k=1e3[-2.4186 -0.0163 -0.070
-0.0033].
Implement the Control Force in MotionView
`-1e3*(-2.4186*AY({b_pendu.cm.idstring})-0.0163*DX({b_pendu.cm.idstring}),-0.070*WY({b_pendu.cm.idstring})-0.0033*VX({b_pendu.cm.idstring}))`Notice that it is simply the dot product between the gain vector (k) and the state vector (x) elements. This solver variable is used to define a force named Control Force - CL.
Activate the force Control Force - CL if it is deactivated.
Check the Stability of a Closed Loop System
Add Disturbance Force and Running the Simulation
-
From the toolbar, click Run
.
-
Once the job is completed, close the solver window and plot the following
results in a new HyperGraph page using
inv_pendu_dyn.abf.
Output Y-Type Y-Request Y-Component control force Marker Force REQ/70000014 Control Force - CL on Body slider(Output control force - final) FX disturbance force Marker Force REQ/70000017 Disturbance-step on Body slider(Output Disturbance step) FX slider displacement -X Marker Displacement REQ/70000006 Body slider(Output slider-disp) DX pendulum angular displacement Expressions REQ/70000016 Output Pendu rotation F2 The plots of disturbance force, control force, slider x displacement, and pendulum angular displacement are shown below.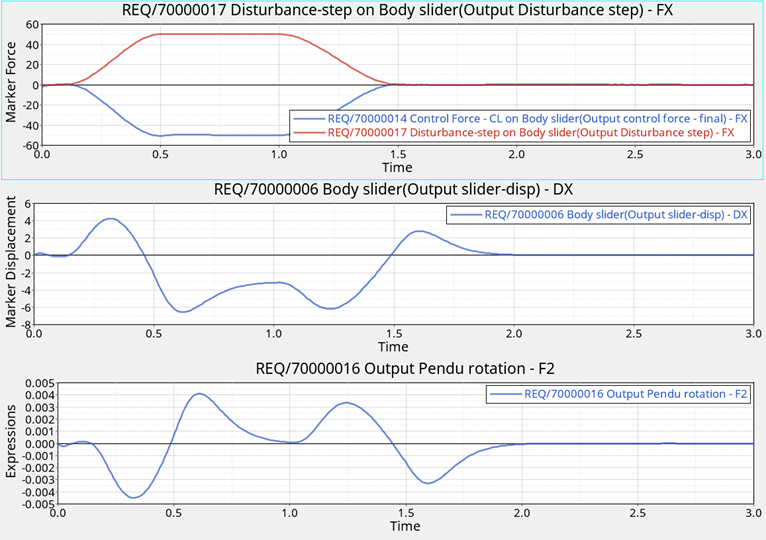
Figure 4. Plots of Disturbance and Control Forces as well as Slider Translational and Pendulum Angular Displacements
References
Feedback Control of Dynamic Systems, G. G. Franklin, J. D. Powell, and A. Emami-Naeini, Third Edition, Addison Wesley.