リンク形状
説明
この要素は、クローラ・履帯リンクの形状を定義します。x軸、y軸、z軸は、クローラ・履帯リンクのローカル参照フレームを定義します。x軸は駆動方向に対して縦方向、y軸は横方向、z軸はx-y平面に対して垂直方向です。 下図 のようにz座標の方向を保ってください。基準座標系をCG座標系と平行に保ちます。CG座標系は、MotionViewモデルで定義されています。参照フレームの原点の位置を選ぶことができます。
Note: すべてのシステムとポイントの原点の横方向の位置は、クローラ・履帯リンクの中間にあります。
土壌との接触は、接触ポイントを指定します。ポイント数は、リンクの形状によって異なります。3点を超えないようにすることをお勧めします。モデルに許される最大のポイントは5点です。典型的な3つの接触点を持つクローラ・履帯リンクのスキームをこの 図に示します。2、3、5個の接触点を持つクローラ・履帯リンクをこの 図に示します。
パラメータ
- WIDTH
- (REAL)
- N_CP
- 接触ポイントの数です。
- WID_OR_MIN
- Bekkerパラメータ b の定義(付録A参照)。
- HEIGHTi
- (REAL)
- LENGTHAi
- (REAL)
- LENGTHBi
- (REAL)
- XC, ZC
- (REAL)
- Xi, Zi
- (REAL) - 点iの参照座標系のベクトルのX成分とZ成分。詳細は 下図 を参照。
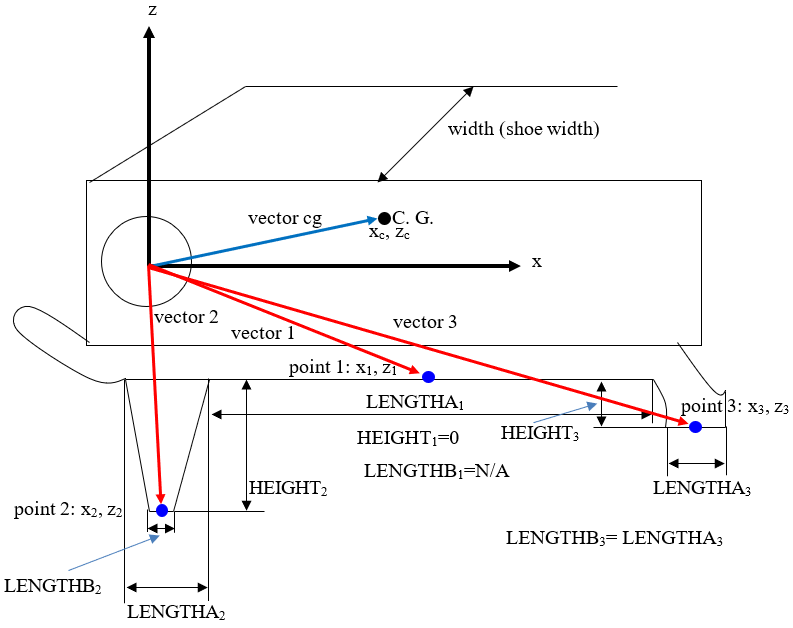
Figure 1. 3つの典型的な接触点を持つクローラ・履帯リンクのスキーム。C.G.座標系はボディ座標系と平行にする必要があります。
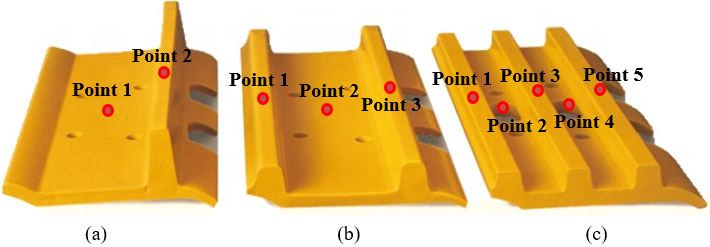
Figure 2. クローラ・履帯リンク:(A) グローサーが1つで2つの接触点を持つリンク、(b) グローサーが2つで3つの接触点を持つリンク、(c) グローサーが3つで5つの接触点を持つリンク。