新機能
MotionSolve2021の新機能に関する情報。
全般
新機能
- クローラ・履帯モデル
- Altairのマルチボディダイナミクス製品(MotionViewとMotionSolve)に、ブルドーザー、掘削機、ロボット、スノーモービル、軍用車両などの装軌車両用のクローラ・履帯道プラグインが追加されました。クローラ・履帯プラグインは、軟質土壌の表面と相互に作用する、2つ以上の車輪で駆動または停止される連続した帯状のトレッドまたは軌道プレートを自動的に組み立てます。クローラ・履帯プラグインのユーザーインターフェースがMotionViewに実装されています。MotionSolveには、軟質土壌モデルや軌道リンクとの相互作用など、装軌車両をシミュレートするために必要なすべての要素が含まれています。クローラ・履帯プラグインの目的は、MotionViewのみを経由して実行することであるため、ソルバーのみのバージョンの説明は省略します。
-
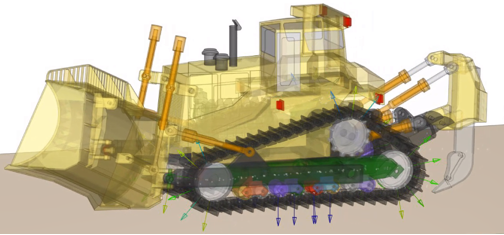
Figure 1. 軟質土壌モデルの上を走行する装軌車両
Figure 2. EDEM粒子の上を走行する装軌車両 - MotionSolveとEDEMの連成シミュレーション - 弾性体接触
- MotionSolveは、最先端のバルク材挙動シミュレーションツールであるAltair EDEMとのインターフェースを有しています。EDEMは、砂、顆粒、被膜、草、岩盤などのバルク材料の挙動をシミュレートして解析する離散要素法(DEM)をベースにしています。この連成シミュレーションの新機能として、コンポーネントモード合成法(CMS)ベースの弾性体とDEM粒子との総合作用がサポートされました。CMS弾性体は、線形範囲内でボディ変形を表すことができます。DEM粒子と弾性体間の接触による反力がシミュレートされ、弾性体の応力・ひずみを求めることができます。現時点で、絶対節点座標法(ANCF)ベースの非線形有限要素(NLFE)とDEM粒子との相互作用はサポートされていません。この機能は将来のリリースに含まれる予定です。
-
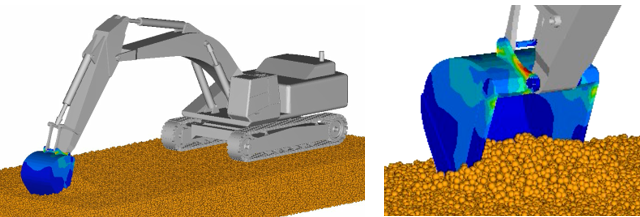
Figure 3. CMSベースの弾性体でモデル化されたバケットが付いた掘削機 - ジョイントの仮想化
- Multibody Dynamicsでは、標準ジョイント、つまり、理想ジョイントは、全体の運動方程式に組み込まれている代数制約方程式のセットとして定義されます。MotionSolveでは、ほとんどの標準ジョイントを仮想化できます。この仮想化では、代数制約が制約されたボディ間の“ソフト”連成に変換されます。ユーザーの視点からは、標準ジョイントと仮想ジョイントは、仮想ジョイントが制約の冗長性を導入しないという例外を除いて、運動学および動力学的には同じです。また、仮想ジョイントは、標準ジョイントと同様にジョイント摩擦を扱うため、摩擦をモデル化する必要のあるブッシュの代わりに適しています。
- Altair Compute Console
- Altair Compute Console(ACC)ユーティリティは、Altairソルバー(OptiStruct、Radioss、Motion Solve、Acusolve、HyperXtrudeなど)の個別のStartメニューエントリを置き換えます。ACCを使用して、ローカルホスト上のソルバーを起動したり、単純なジョブをリモートLinuxサーバー / クラスターまたはPBSシステムにサブミットしたりします。ACCには、入力ファイルの選択、実行オプションの定義、キューを使用した複数のソルバーランのサブミット、遅延のスケジュール、解析の進捗の監視、ジョブの強制終了 / 一時停止、およびOptiStructとMotion Solveを使用したAcuSolveの流体-構造相互作用(FSI)解析シーケンスの実行を行うためのインタラクティブなGUIが含まれています。
機能強化
- OMLベースのユーザーサブルーチンのサポート
- リリース2020.1から、MotionSolveは、組み込みのOMLインタープリターを使用してOpenMatrix言語(OML)で記述されたサブルーチンをサポートします。基本のOMLインタープリターは、基本のOMLシンタックスをサポートしますが、追加のツールボックスやライブラリを包含 / サポートしていません。このリリースでは、MotionSolveがAltair Composeのインストールと連携してOMLベースのサブルーチンを解釈します。これにより、Altair Composeに含まれている何百もの強力な数学演算と組み込み関数にアクセスできるようになります。これらの範囲は、線形代数から、統計、微分方程式、信号処理、制御システム、多項式フィッティング、最適化にまで及びます。Composeインストールが存在しない場合は、MotionSolveが組み込みOMLインタープリターを使用します。OMLベースのサブルーチンはWindowsでのみサポートされます。OMLサブルーチンに対するLinuxサポートは今後のリリースで提供される予定です。OMLとMATLABのスクリプト言語が似ているため、スクリプトで追加のツールボックスやライブラリが参照されていない限り、組み込みOMLインタープリターを使用してMATLABスクリプトを解釈することもできます。この場合は、MotionSolveがMathWorksのMATLABインストールを探して、最初に*.mファイルを解釈しますが、それぞれのインタープリターがインストールされていない場合は、MotionSolveが代わりにその独自の基本OMLインタープリターを使用して*.mスクリプトを実行します。
- 近接センサー
- 近接センサーは、2つのボディ間の最小分離を監視します。このセンサーは、2つのボディの干渉状態、それらの最小距離、および最も近いポイントのペアの座標を追跡します。このリリースでは、このセンサーの計算性能が向上しています。また、グラフィックスの洗練度の調整レベルが入力から削除されました。以前は、メッシュされた形状のポイント間の距離だけが計算されていました。新しいバージョンは、三角形 / ライン / ポイントの組み合わせ間の最小距離も計算するため、洗練度の調整が必要なくなります。また、センサーは、該当する場合に、初期形状に対して解析アプローチを使用しようとします。
-
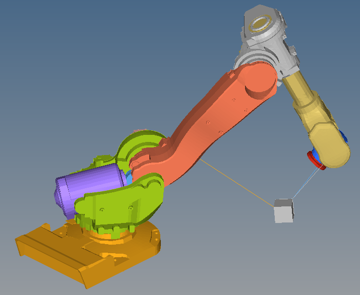
Figure 4. 持ち上げる必要のあるボックスとロボットアームの最短距離の連続測定。 - ActivateのMotionSolveプラントへのPythonファイル入力
- ActivateのMotionSolveプラントは、MotionSolveのPythonファイルを入力ファイルとして受け取ることができます。このPythonファイルは、PythonベースのMSolve-APIを使用してモデルおよびコマンドステートメントを定義します。MDLおよびXMLファイルも有効な入力ファイルとして残ります。InspireMotionのモーションエンジンはMotionSolveによって駆動されるため、モデルをPythonファイルとしてInspireMotionからエクスポートし、MotionSolveプラントとしてActivateにインポートすることによって、連成シミュレーションを実行できます。モーターなどの特定のInspireコンポーネントのプラント入力とプラント出力は、Activate内でコントローラーなどの他のActivateコンポーネントとの結合に使用できます。
- MotionSolveとEDEMの連成シミュレーション - 全般
- MotionSolveとAltair EDEMはクロスプラットフォーム / マルチマシンシミュレーションをサポートしていますが、MotionSolveには同じマシン上に追加のEDEMインストールが必要でした。MotionSolveは、連成シミュレーションにEDEMの特定のバイナリを使用していました。このリリースでは、クロスプラットフォーム / マルチマシン連成シミュレーション用に、同じマシンでMotionSolveに加えてEDEMをインストールする必要がなくなるように、必要なバイナリがMotionSolveにパッケージ化されています。
- MotionSolveとOptiStructの連成シミュレーション - 全般
- MotionSolveは、OptiStructとのインターフェースを提供します。OptiStructで塑性変形を受けたり、他の弾性体と接触したりする弾性体を定義でき、それをMotionSolveでインターフェース節点(球ジョイント)を介してより大規模な機械システムと結合できます。このリリースでは、MotionSolveとOptiStruct間のインターフェース節点間に新しい安定化アルゴリズムが導入されたため、より大きな時間ステップとより堅牢な連成シミュレーションエクスペリエンスが可能になります。連成シミュレーションは、現在、MotionViewで試験的な機能としてのみ使用できます。この機能をアクティブにするには、環境変数HW_MV_EXPERIMENTAL=OSFLEXを設定します。
- 記述子(暗黙的な)状態空間モデル
- MotionSolveは、線形解析ステップ中に状態空間表現用のマトリクスを生成できます。それぞれのマトリクス(A、B、C、D)は、物理システムの数学モデルを1次微分方程式によって関連付けられた入力、出力、および状態変数のセットとして表します。これまで、MotionSolveは、状態空間生成用の入力として力のみをサポートしていました。リリース2020.1以降は、入力としてモーションも定義でき、陰解法線形モデルが生成されます。モーションは、Eẋ = Ax + Buやy = Cx + Du(は状態ベクトル、uは入力ベクトル、yは出力ベクトル)の形式での記述子状態空間表現につながる代数制約として追加されます。記述子状態空間は、現在、MotionSolveで.xml入力ファイルまたはMsolve APIを介してサポートされます。MotionView経由では使用できません。このリリースでは、より堅牢な解析を行うため、記述子状態空間に対して、小規模な機能強化が行われました。
- 線形解析用のPSTATE
- Reference_PlantStateには、モデル内で定義されたVARIABLESのリストが含まれています。これらのVARIABLESは、線形化で使用される状態を定義します。MotionSolveは、線形問題を生成するためにこれらの状態を使用します。Reference_PlantStateは、現在、MotionSolveで.xml入力ファイルまたはMSolve APIを介してのみサポートされます。MotionViewは、今後のリリースでこの機能をサポートする予定です。このリリースでは、PSTATEに対して小規模な機能強化が行われ、属性numerical_Jacobian(Parameters: Linear Solverステートメント内)が廃止されました。
解決された問題点
- 線形解析で、特定のインスタンス内の高次動的効果が無視される。現在は、近似の代わりに、運動方程式の正確な線形化が使用されます。
- Fieldタイプの力がCMSベースの弾性体に直接加えられた場合に、線形解析で誤った結果が出力される。