TeimOrbit 2D Road Type: stochastic_uneven
A stochastic uneven road profile for left and right wheels is generated, and has properties very close to measured road profiles.
In the first step, discrete white noise signals are formed on the basis of nearly uniformly distributed random numbers, two of these assigned to every 10mm of travel path. The distribution of these random numbers is approximated by summing up several equally distributed random numbers, taking advantage of the law of large numbers of mathematical statistics.
Next, these values are integrated with respect to travel distance, using a simple first order time-discrete integration filter. The reason for not using a pure integrator is to cut off extremely low frequencies, which results in large road elevation values, not at all affecting vehicle dynamics.
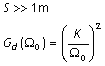
The independent variable of the filter is not time, but travel path. This is why the filter
cut-off frequency  is
controlled by a path constant
is
controlled by a path constant  instead of a time constant. Approximate power spectral density (PSD) of this road surface
profile is given by:
instead of a time constant. Approximate power spectral density (PSD) of this road surface
profile is given by:

Where,
The filter process results in two realizations of the approximate white velocity noise; two signals, the derivatives of which are close to white noise. Signals with this property are known as road profiles with waviness w = 2 (Refer to ISO 8608). Several investigations show the waviness derived from measured road displacement PSDs ranges from about 1.8 to 2.2.
The reference spectral density value  , with
, with  , is
used in ISO 8608 to classify road surface profiles, according to the following table:
, is
used in ISO 8608 to classify road surface profiles, according to the following table:
 |
|||
|---|---|---|---|
| Road Class | min. value | mean value | max. value |
| A | - | 1 | 2 |
| B | 2 | 4 | 8 |
| C | 8 | 16 | 32 |
| D | 32 | 64 | 128 |
| E | 128 | 256 | 512 |
| F | 512 | 1024 | 2048 |
| G | 2048 | 4096 | 8192 |
| H | 8192 | 16384 | - |
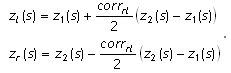
The last step in the generation of the stochastic uneven road profiles is to linearly
combine the two realizations  ,
,  , of the above mentioned process, resulting in the left and right
profile
, of the above mentioned process, resulting in the left and right
profile  ,
,  . This is
done such that these two signals are completely independent, if correlation_rl =
0.0, and identical, if correlation_rl = 1.0:
. This is
done such that these two signals are completely independent, if correlation_rl =
0.0, and identical, if correlation_rl = 1.0:
| Name of input variable | Unit | Meaning | |
|---|---|---|---|
| one of | reference_spectral_density | m3 |  |
| ISO_8608_road_class | A, B, .. | ISO 8608 road class, according to table above. Mean value of the respective class is used. |
|
| path_constant | m | Path constant S to control high-pass integration filter cut-off frequency in path domain. Parameter is optional, default value is 1000 m. | |
| correlation_rl | - | Variable to control correlation between left and right track: no correlation, if zero; complete correlation (left track = right track), if one. Any value between 0 and 1 is allowed. | |