チュートリアル:MotionSolveを使用した連成シミュレーション
倒立振り子のマルチボディシステム(MBS)モデルを構築し、制御システムモデルと組み合わせて、この二つのモデルの連成シミュレーションを実行する方法を学習します。
このチュートリアルのファイル
Inverted_Pendulum_Tutorial.scm、Inverted_Pendulum_Tutorial.mdl
連成シミュレーションと前提条件の概要
連成シミュレーションにより、シミュレーション中にMotionSolveマルチボディダイナミクス(MBS)モデルとActivateモデルの間でのコミュニケーションを可能にします。
連成シミュレーションの最適な適用例は、MBSモデル用制御システムの開発です。本チュートリアルでは、倒立振り子向けにそのような制御システムを開発する方法を説明します。
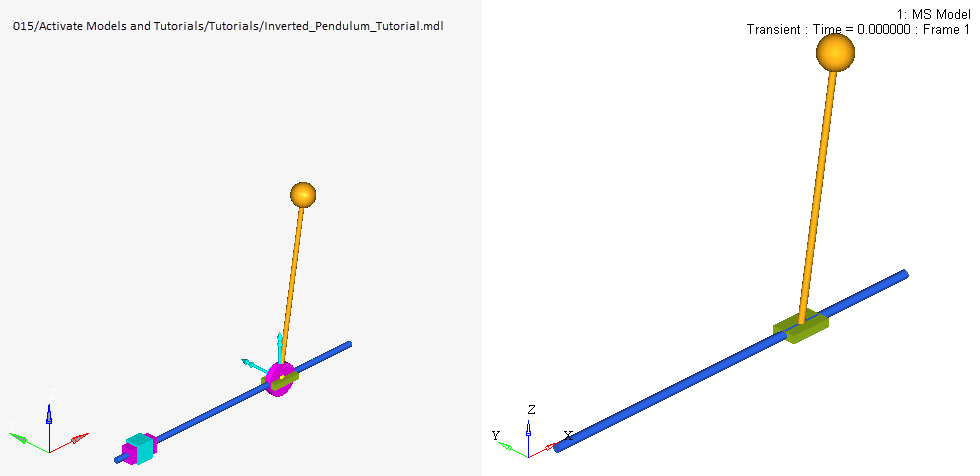
倒立振り子とは、動いている線路上のカートに取り付けたピボットポイントの周りを水平に動く振り子など、ピボットポイントの上方に重心がある振り子のことです。通常の振り子は吊り下げると安定するのに対して倒立振り子は本質的に不安定であるため、真っすぐに保つにはピボットポイントにトルクを与えるか、またはフィードバックシステムの一部としてピボットポイントを水平に動かして能動的にバランスをとる必要があります。
本チュートリアルでは、子供が手の上で棒のバランスをとるのと同じように、カート上で水平に作用する制御力を設計して振り子を直すぐに保つ方法を説明します。倒立振り子は力学と制御理論における代表的な問題であるため、制御方式をテストするためのベンチマークとして使用されます。現実世界での倒立振り子問題の例には、発射時のロケットの姿勢制御やセグウェイ電動車のバランス維持と動きなどがあります。
前提条件
連成シミュレーションを実行するには、HyperWorks MotionSolveソフトウェアをインストールする必要があります。MotionSolveは、複数の分野にわたるシミュレーションにモデリング、解析、可視化、最適化のための強力な機能を提供します。このようなシミュレーションとして、運動学 / 動力学上のシミュレーション、静的 / 準静的シミュレーション、線形シミュレーションと振動のシミュレーション、応力 / 耐久性のシミュレーション、荷重抽出、連成シミュレーション、工数推定、パッケージングのシミュレーションなどがあります。
ソフトウェアパス設定の定義
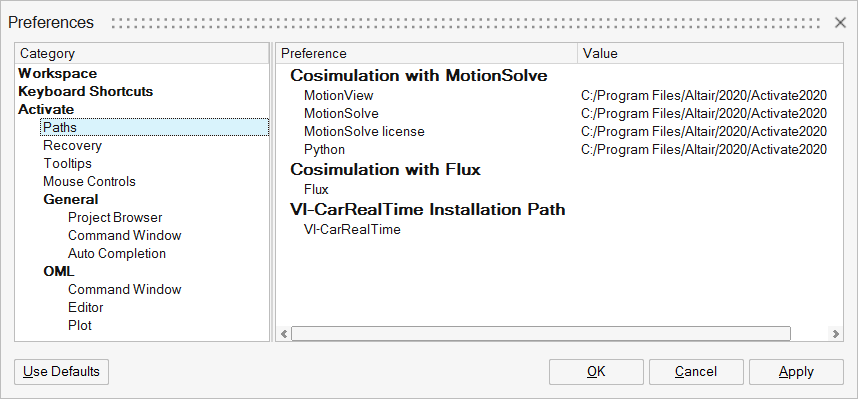
ローカルおよびリモートの連成シミュレーション方法に必要なMotionSolveおよびその他のソフトウェアへのパスを定義します。
-
ダイアログの左側でActivate Pathsのカテゴリを選択します。
倒立振り子の構築
カート上の倒立振り子のマルチボディシステム(MBS)モデルを構築します。
MBSモデルのエンティティ
- 振り子
- カート
- 振り子をカートに結び付けるためのロッド
- カートの動きを水平方向に制限するためのレール
- カート上に配置された、振り子とカートの間のピボット
形状を構築する
MotionViewソフトウェアを使用して、倒立振り子の形状を作成します。
ボディを追加する
振り子とカートをモデルに追加します。
ジョイントを追加する
回転ジョイントと並進ジョイントをモデルに追加します。
-
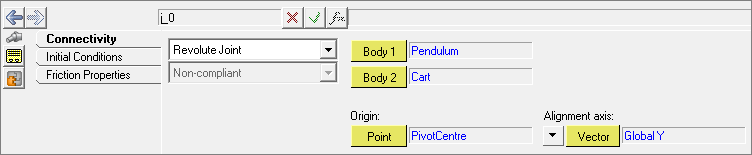
回転ジョイントを挿入してPendulumPivotというラベルを付け、Connectivityパラメーターを次のように設定します:
-
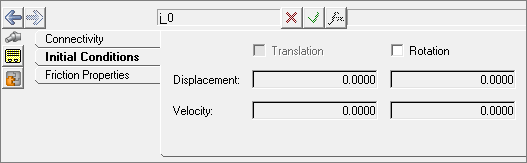
初期条件を次のように設定します:
-
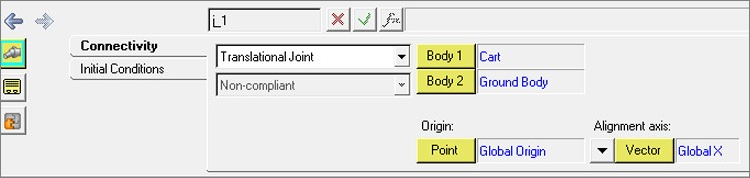
並進ジョイントを挿入してCartTranslationというラベルを付け、Connectivityパラメーターを次のように設定します:
-
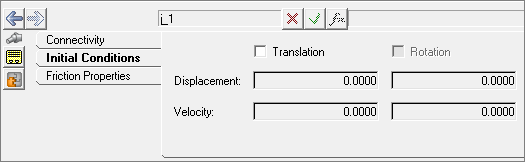
初期条件を次のように設定します:
グラフィックスを追加する
グラフィックスは、アニメーションでのモデルの挙動を理解するために不可欠です。
-
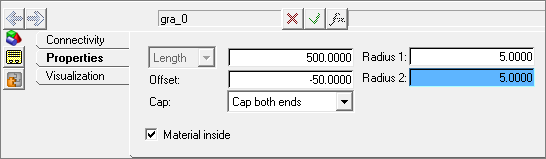
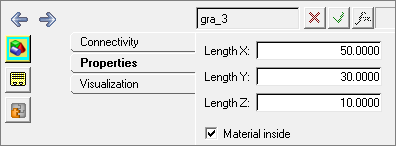
プロパティを次のように設定します:
-
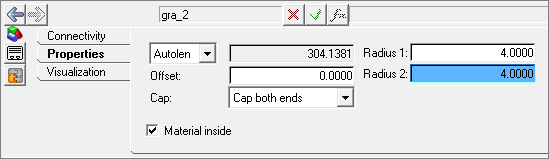
プロパティを次のように設定します:
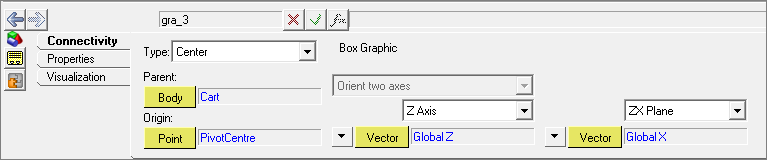
-
Connectivityパラメーターで、タイプをCenter、親ボディをCart、原点をPivotCenter、Z軸をベクトルGlobal Z、ZX平面方向をベクトルGlobal Xにそれぞれ設定します。
-
プロパティを次のように設定します:
荷重を追加する
並進荷重をカートに適用します。
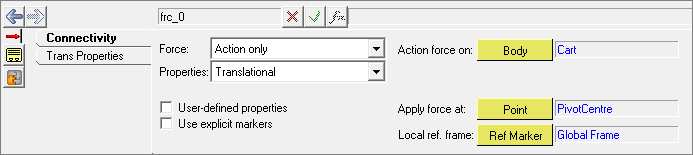
-
Connectivityタブで荷重frc_0を追加してControl Forceというラベルを付け、Connectivityプロパティを次のように設定します:
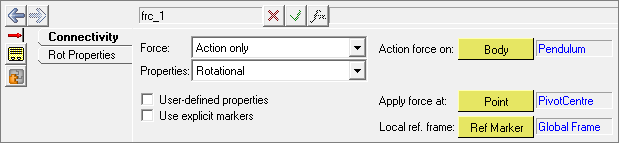
-
Connectivityタブで2つ目の荷重frc_1を追加してPivotTorqueというラベルを付け、Connectivityプロパティを次のように設定します:
MBSモデルの連成シミュレーション向け変更
ソルバー配列やソルバー変数などのMotionViewエンティティを追加することで、基本的なMBSモデルを連成シミュレーション用に変更します。
ソルバー変数を追加する
-
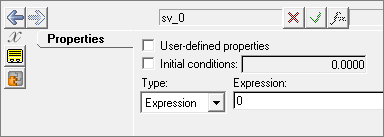
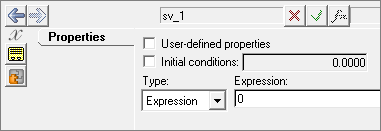
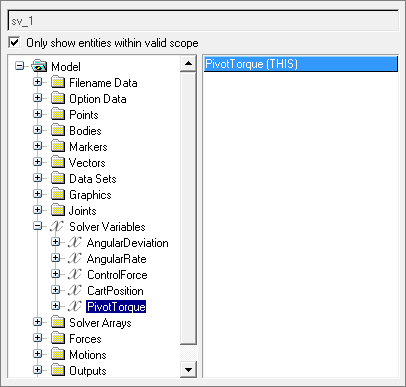
2つのソルバー変数ControlForce (varname: sv_0)およびPivotTorque (varname: sv_1) を以下のように作成します。
-
これら2つのソルバー変数を前のセクション荷重を追加するで作成した荷重に接続します。
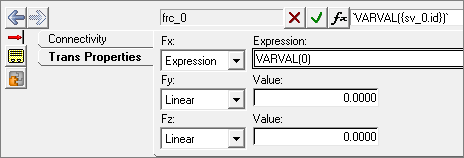
ControlForceのTrans Propertiesタブで、次の図のようにFxにExpressionを選択し、fに`VARVAL({sv_0.id})`と入力します。この式は、ControlForceを1つ目のソルバー変数sv_0に指定します。この変数は、Activateから送信された制御信号をCartの並進ジョイントに作用する制御荷重として設定します。
-
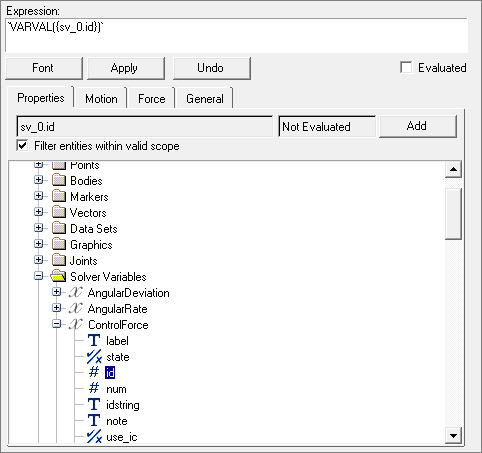
varnameが(sv_0)と一致することを確認します。ソルバー変数をExpression Builderから名前で選択し、そのIDを次の図のように入力します:
-
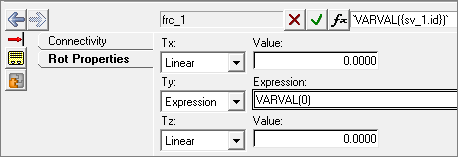
PivotTorqueのRot PropertiesタブでTyにExpressionを選択し、fに`VARVAL({sv_1.id})`と入力します。この式は、PivotTorqueを2つ目のソルバー変数sv_1として設定します。この変数は、Activateから送信された制御信号を振り子の回転に作用するトルクとして指定します。
-
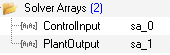
2つのソルバー配列を挿入し、ControlInput、PlantOutputというラベルを付けます。
-
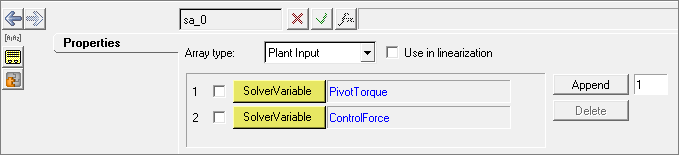
ControlInputソルバー配列は、PivotTorqueとControlForceの両ソルバー変数を含んでいます。プロパティを次のように設定します:
-
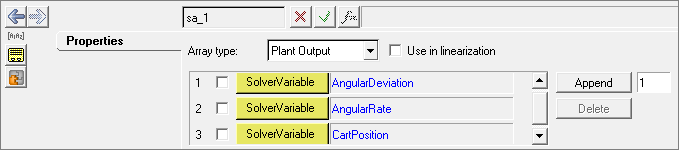
PlantOutputソルバー配列は、AngularDeviation、AngularRate、CartPositionというソルバー変数を含みます。Plant Outputプロパティは次のように設定します:
-
適切なソルバー変数名を選択しやすくするために、
 をクリックすると、次のパネルが表示されます:
をクリックすると、次のパネルが表示されます:
倒立振り子モデルの検証
MotionSolveでMBSモデルをシミュレートして、このモデルが要求どおりに実行されることを検証します。
-
Runパネルで、モデルをXMLファイルとして保存します。このファイルはソルバーの実行に使用されるだけでなく、Activateモデルでも使用されます。あるいは、MotionViewの.mdlファイルを実行してInverted_Pendulum_Tutorial.xmlという名前を付けることもできます。

-
シミュレーションの結果をアニメーション表示してモデルが意図したように動作することを確認し、次のステップに進みます。コントローラーはモデルにまだ接続されていないため、入力される荷重とトルクはゼロです。
制御システムモデルの構築
Activateを使用して制御システムモデルを構築します。
制御システムモデルには、以下のブロックが必要です:
| ブロック | 説明 |
|---|---|
| MotionSolve | MotionSolveモデルをActivateモデルに組み込むことを可能にします。 |
| Mux | 複数の信号を1つの信号として読み込みます。 |
| Demux | 複数の成分を含む信号を読み込んで個々の成分に分解します。 |
| OMLCustomBlock | |
| Scope | データを指定に沿ってプロットします。 |
| Constant | コマンド信号を生成します。 |
| PID | モデルの頭脳であるコントローラーブロックとして機能します。 |
| Sum | 基準信号とフィードバックから誤差を計算します。 |
Activateモデルのダイアグラムの作成
-
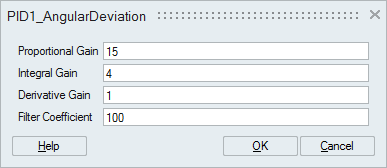
PID1_AngularDeviationブロックをダブルクリックして、次のパラメーター値を入力します:
 NoteColonSymbol
NoteColonSymbol- 比例ゲイン(Proportional Gain)は、誤差信号に定数ゲインKpを掛けます。
- 積分ゲイン(Integral Gain)は、誤差の合計履歴に積分ゲインKiを掛けます。
- 微分ゲイン(Derivative Gain)は、誤差の変化率にゲインKdを掛けます。
-
PID2_CartPositionブロックをダブルクリックします。ダイアログで、次のパラメーターを定義します:
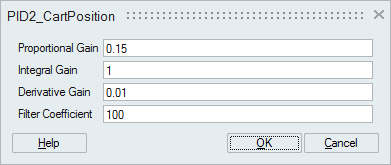
-
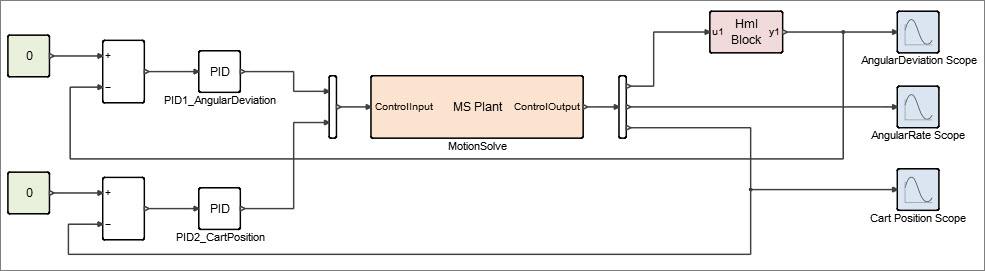
これで、必要なすべてのブロックが配置されました。ダイアグラムにあるブロックを次のように組み立てて結び付けます:
ダイアグラムのシミュレーション
-
リボンで、
 から設定
から設定 を選択します。
を選択します。
-
リボンでRun
 を選択します。
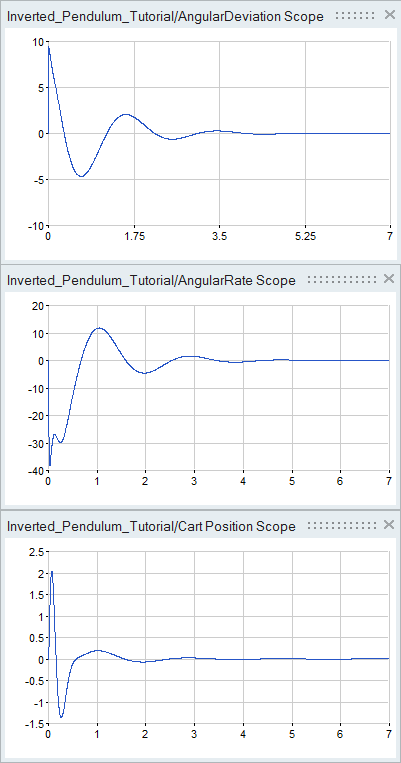
モデルにあるScopeブロックによって、カートのプロットとして角偏差、角速度、およびカート位置が生成されます。
を選択します。
モデルにあるScopeブロックによって、カートのプロットとして角偏差、角速度、およびカート位置が生成されます。