MBDモデリングとMotionSolveとの連成シミュレーション
データ交換によるMBDモデリングとMotionSolveを使用した連成シミュレーションについて学習します。
Activate では、連成シミュレーションインターフェースにより、マルチボディシステム(MBS)と複数の制御サブシステムを含む複合システムをシミュレートできます。MBSをMotionSolveでシミュレートし、制御サブシステムをActivateすることにより、システム全体を効果的にシミュレートすることができます。
連成シミュレーションには、HyperWorks MotionSolveソフトウェアのインストールが必要です。MotionSolveは、複合領域シミュレーションのためのモデリング、解析、ビジュアライゼーションおよび最適化のための強力な機能を提供します。これらのシミュレーションには、運動学・動力学シミュレーション、静的・準静的シミュレーション、線形・振動シミュレーション、応力・耐久性シミュレーション、荷重抽出、連成シミュレーション、工数予測、パッケージング組み立てシミュレーションなどがあります。
MotionSolveまたはMotionViewとActivateとの間の連成シミュレーションは、ローカルまたはリモートのコンピューターシステム上で実行できます。
詳細については、上級ユーザーのための拡張定義で連成シミュレーションに関する章をご参照ください。
連成シミュレーションのためのモデリング
MBSと制御システムモデル間の入力および出力を定義するための特別なステートメントおよびブロックが用意されています。
- 入力および出力を参照するステートメント
- フォースやトルクのような入力として、もしくは、変位は速度のような計算結果出力として使用される変数を参照するために、MotionSolveモデルに特別な構文
Control_PlantInputとControl_PlantOutputを加えることができます。
- MSPlant (MotionSolve Plant) およびMSSignal (MotionSolve Signal) ブロック
- MotionSolveモデルは、MSPlantまたはMSSignalブロックを通してActivateモデルに接続されます。これらのブロックは、MotionSolveモデルを指定し、このモデルで定義された
ControlPlant要素に基づく入力および出力を持ちます。ActivateとMotionSolveの間に連成シミュレーションのIPCがあることから、モデルには複数のMSPlantブロックまたはMSSignalブロックを追加できます。詳細は、ブロックのヘルプまたは上級ユーザーのための拡張定義をご参照ください。
- 入力としてのMotionViewモデル
- MSPlantおよびMSSignalsブロックは、入力としてMotionSolveモデルまたはMotionViewモデルをサポートします。MotionViewモデルが使用された場合、MotionViewへのパスがPreferencesダイアログで定義されていれば、そのモデルを開いて編集することができます。実際の連成シミュレーションはMotionSolveで実行されるため、必要であれば、.mdl MotionViewモデルファイルを.xml MotionSolveモデルファイルに変換することからシミュレーションプロセスがスタートします。
ローカル連成シミュレーションの設定
同じコンピューターシステム上でActivateとMotionSolveの間に連成シミュレーションを設定します。
| 設定方法 | 設定上の指示 |
|---|---|
| ローカル |
|
リモート連成シミュレーションの設定
ネットワーク経由でアクセス可能な別々のマシン上にあるMotionSolveとActivateの間で連成シミュレーションを設定します。
概要
ここでは、リモートのシミュレーション設定として、ActivateがマシンAにインストールされ、MotionSolveがマシンBにインストールされていて、マシンAとマシンBは互いに異なるものであるとします。MotionSolveのモデルがマシンBに配置されていて、そのモデルをマシンAに転送してローカルの連成シミュレーションを実行することが現実的ではない場合、リモート設定のシナリオが有用です。リモート連成シミュレーション設定のガイドライン
- IPアドレスは、xyz.xyz.xyz.xyz形式で入力する必要があります。
- IPアドレスを指定するときの、デフォルトのポート番号は22903です。
- リモート連成シミュレーションを実行する場合、マシンAにMotionSolveのすべてをインストールする必要はありません。ただし、nuclient.dllやmsciscos.dllなどのMotionSolveバイナリや、これらのバイナリで読み込まれる.dllファイルは必要です。
- リモート連成シミュレーションを実行するときには、マシンBにActivateをインストールしておく必要はありません。
- localhostとしてのIPアドレスを指定すると、msdaemonなどのユーティリティをMotionSolveインストールから呼び出す必要はありません。
- マシンAとマシンBの間にファイアウォールが存在する場合、連成シミュレーションを実行できるようにするには、このファイアウォールを無効にする必要があります。
| コンピューターシステム | 設定上の指示 |
|---|---|
| マシンA |
|
| マシンB |
|
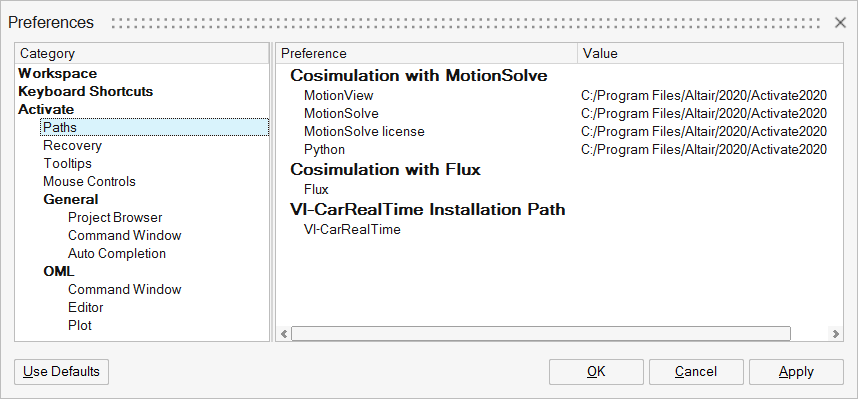
ソフトウェアパス設定の定義
ローカルおよびリモートの連成シミュレーション方法に必要なMotionSolveおよびその他のソフトウェアへのパスを定義します。
-
ダイアログの左側でActivate Pathsのカテゴリを選択します。