実行設定
実行設定ツールを使用して、デフォルトのモーション実行設定を変更します。
モーションシミュレーションの実行時間、結果出力のフレーム数、解析のタイプ、重力を考慮するかどうかを制御できます。
モーション解析ツールの上にカーソルを合わせると表示されるサテライトアイコン ![]() をクリックして、モーション解析の実行設定を変更します。
をクリックして、モーション解析の実行設定を変更します。
モーション実行設定の編集
モーション解析の実行ウィンドウを使用してモーション解析の実行の設定を変更します。
-
モーション解析ツールにカーソルを合わせ、実行設定
 サテライトアイコンをクリックします。
サテライトアイコンをクリックします。
- モーションモデルをMotionViewファイル(.mdl)またはMotionSolve pyファイル(.py)などの解析設定を含めてエクスポートするには、エクスポートボタンを使用します。
- 単位系はエクスポート時に選択しますが、プリファレンスで優先モデル単位系を設定してからエクスポート前にモデルを実行することをお勧めします。
- ご使用のモデルについて、すべてのデフォルトのモーション解析の設定を元に戻すには、リセット > デフォルトオプションを使用します。
標準設定
モーション解析の実行ウィンドウのオプションを使用して、モーション解析を定義します。
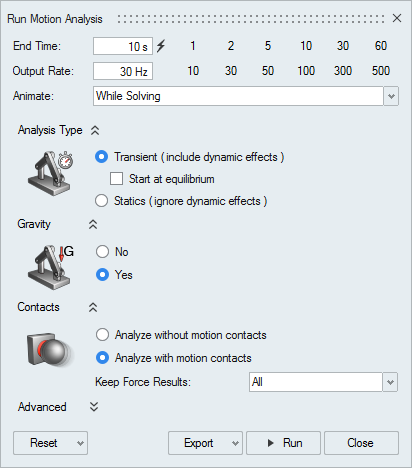
図 1. モーション解析の実行- 終了時間
- 終了時間は、モーションシミュレーションを実行する時間の長さを示します。Ctrlキーを押しながら終了時間計算ボタンをクリックすると、さらに10%の時間が追加されます。これは、プロファイル終了後のモデルの動作を確認するのに便利です。
- 出力レート
- 出力レートは、結果出力のフレーム数を制御します。数字が大きいほど、滑らかに連続する結果を得られますが、アニメーションはゆっくりになります。
- アニメーション
- このオプションは解析中にモデルがアニメーションを行うかどうかをコントロールします。終了時を選択すると、実行完了までの時間が短くなります。実行が正常に完了しても、スペースバーを押すか、アニメーションツールバーで再生ボタンをクリックすると、アニメーションを再生できます。
- 解析タイプ
- モーション解析は、非定常、静的、またはその両方のいずれかです。
- 非定常解析は、時間依存のモーションシミュレーションに動的効果を考慮するために使用します。まず平衡解から開始するには、釣り合い状態からスタートを有効にします。
- 静的解析は、メカニズムの静的平衡点位置の判別に使用します。この分析タイプではすべての速度および減衰条件は無視されます。そのため、動的効果を考慮せずに、荷重を分析するのに役立ちます。
- 重力
- この設定は、モーション解析に重力を考慮または除外するために使用します。重力を考慮するには、重力ツールを使用して、まず、重力加速度を適用する必要があります。
- 接触
-
- モーション接触なしで解析:このオプションは、モーション解析からモーション接触を削除するために使用します。
- モーション接触で解析:このオプションは、モーション解析からモーション接触を追加するために使用します。
-
接触力結果保存は、モーション解析後にモデルに格納される接触力の数を制御するグローバル設定です。すべて、領域のみ、またはなしを選択します。
領域のみオプションは、フォースエクスプローラの合計の力の領域位置設定に対応します。領域のみまたはなしを選択した場合は、フォースエクスプローラを使用してモーション結果のアニメーション表示をするときに、特定の接触に対して指定したコンテンツのレベルのみが表示されます。例えば、領域のみを選択した場合、個々の(合計されていない)荷重ベクトルは表示されません。同様に、なしを選択した場合、接触による荷重ベクトルは表示されません。
注: 接触力結果保存のグローバル設定を上書きしてモーション接触を個別に処理する場合はプロパティエディターから実行できます。
アドバンスト設定
ソルバー設定、モデルチェック、およびプロッティングに関する詳細オプションを表示するには、アドバンストの横にあるシェブロン ![]() をクリックします。
をクリックします。
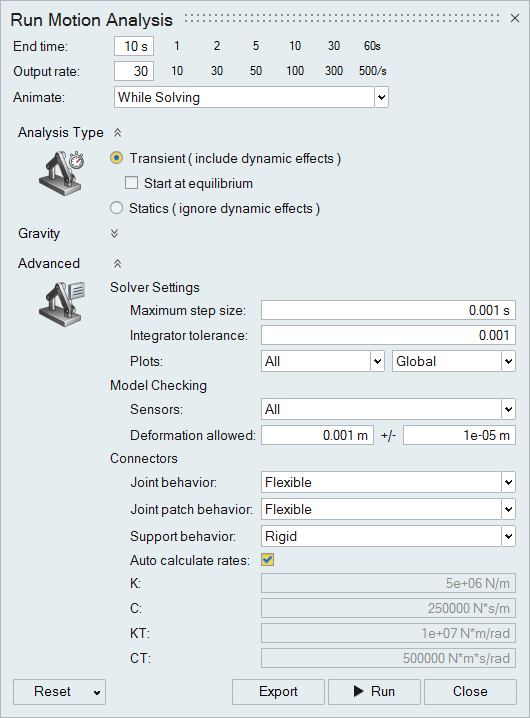
図 2. アドバンスト設定
ソルバー設定
- 最大ステップサイズ
- 積分に許容される最大ステップサイズ。
- 積分器の最大次数
- これは積分器が取り得る最大次数です。デフォルト値は5です。次数が高くなるほど精度は上がりますが、安定性は下がります。アプリケーションによっては、断続的な接触など、デフォルト値をオーバーライドして小さい値(2または1)に設定してください。
- 積分トレランス
- この許容値は、積分ステップあたりの最大絶対誤差を表します。
- DAE指数
- これはソルバーの微分方程式および代数方程式(DAE)の指数です。オプションはI3(デフォルト)またはSI1です。SI1を選択すると、指定した積分トレランスの精度が向上することがありますが、実行時間が長くなることもあります。
- プロット
- 作成するプロットのオプション(すべて、Exclude for parts、なし)および使用する参照フレームのオプション(グローバル、ローカル)があります。
- 最後の実行を保存
- このオプションをオフにすると、モデルの保存時にモーション結果が含まれないため、.stmodファイルのサイズが小さくなります。
- アニメーションファイルを作成
- アニメーションファイルを生成する際に、すべてのデータを含む、接触データを除く、またはなしを選択できます。MotionSolveは、有効にすると、モーション解析が正常に実行された最後に、run.h3dファイルを実行履歴フォルダに書き込みます。このファイルは、HyperWorksで(HyperViewを介して)、またはスタンドアロンHyperView Playerを使用して、アニメーションの再生に使用できます。接触データを除く設定は、モデルにモーション接触がある場合にH3Dファイルの全体サイズを小さくするのに役立ちます。デフォルト設定(なし)は、モーション解析で.h3dファイルが書き込まれないようにします。
- ログファイル
- モーション関連のソルバーファイルを実行後も残すには、残すを選択します。実行後にファイルを自動的に削除するには、破棄するを選択します。必要に応じてログファイルを削除するには、今すぐ削除ボタンをクリックします。
モデルチェック
- センサー
- 有効にするモデリングチェックセンサー(すべて、ジョイント変形を除外、なし)のオプションがあります。
- 許容変形
- ジョイントの許容変形 + または - 許容値を指定します。デフォルト値は1 mmです。
コネクター
この設定は、コネクターのデフォルトの動作をグローバルレベルでオーバーライドするために使用します。デフォルトでは、すべてのジョイントの表示は変形します。以下のオプションが変形するに設定されると、ジョイントはリニアブッシングモデルとして動作します。変形しないに設定すると、ジョイントは理想化され、変形しません。オプションをバーチャルに設定すると、剛体ジョイントと非常に似ていますが、冗長なジョイントを回避するのに便利な「ソフト制約」動作を持つエキスパート向けオプションです。
- ジョイントの動作
- ピンとスライディングピンの場合、デフォルトは変形するです。
- ジョイントパッチの動作
- 形状フィーチャーを共有するパート上のジョイントの場合、デフォルトは変形するです。
- 拘束の動作
- 拘束の場合、デフォルトは変形しないです。
- 自動計算
- デフォルトでは、グローバルレート(下記)は自動的に判別されます。任意のレートを入力するには、このオプションを無効にします。
- K:剛性率
- C:減衰率
- KT:ねじり剛性率
- CT:ねじり減衰率
ショートカット
| 動作 | 操作 |
|---|---|
| 実行を中断する | Escキーを押します。 |