The need of simple and efficient element in nonlinear analysis of shells undergoing large
rotations is evident in crash and sheet metal forming simulations. The constant-moment plate
elements fit this need. One of the famous concepts in this field is that of Batoz et al.
1 known under DKT elements where DKT stands for Discrete
Kirchhoff Triangle. The DKT12 element 1, 2 has a total of 12 DOFs. The discrete Kirchhoff plate
conditions are imposed at three mid-point of each side. The element makes use of rotational
DOF. at each edge to take into account the bending effects. A simplified three-node element
without rotational DOF is presented in 3. The rotational DOF is computed with the help of
out-of-plane translational DOF in the neighbor elements. This attractive approach is used in
Radioss in the development of element SH3N6 which based on
DKT12.
Strain Computation
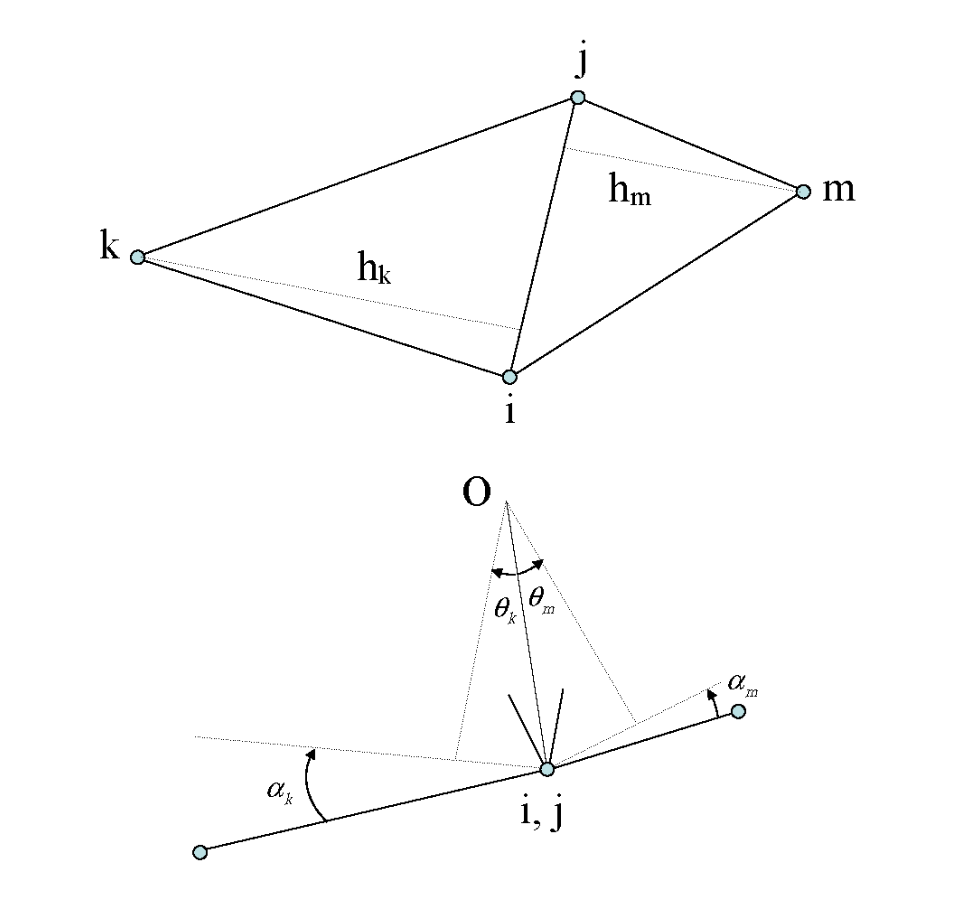
Consider two adjacent coplanar elements with a common edge i-j as shown in Figure 2. Due to out-of-plane displacements of nodes and , the elements rotate around the side i-j. The angles between
final and initial positions of the elements are respectively and for corresponding opposite nodes and . Assuming, a constant curvature for both of elements, the
rotation angles and related to the bending of each element around the common side
are obtained by:(1)
However, for total rotation you have:(2)
which leads to:(3)
Figure 1. Computation of Rotational DOF in SH3N6
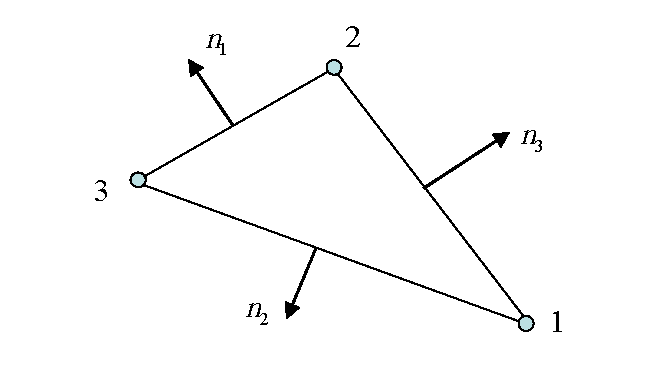
Consider the triangle element in Figure 2. The outward normal vectors at the three sides are defined and denoted , and . The normal component strain due to the bending around the
element side is obtained using plate assumption:(4)
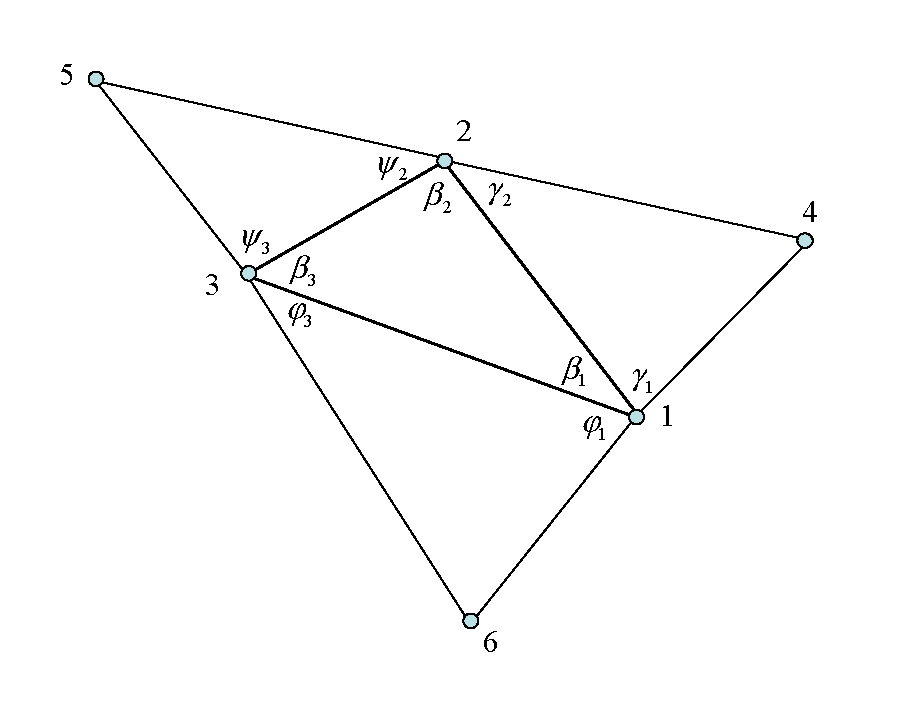
The six mid-side rotations are related to the out-of-plane displacements of the six apex nodes as
shown in Figure 3 by the following relation:(5)
Where, , ,
and are respectively the heights of the triangles (1,2,3), (1,4,2), (2,5,3)
and (3,6,1). Figure 2. Normal Vectors Definition
The non-null components of strain tensor in the local element reference are related to the
normal components of strain by the following relation: 13(6)
Figure 3. Neighbor Elements for a Triangle
Boundary Conditions
Application
As the side rotation of the element is computed using the out-of-plane displacement of the
neighbor elements, the application of clamped or free boundary conditions needs a particular
attention. It is natural to consider the boundary conditions on the edges by introducing a
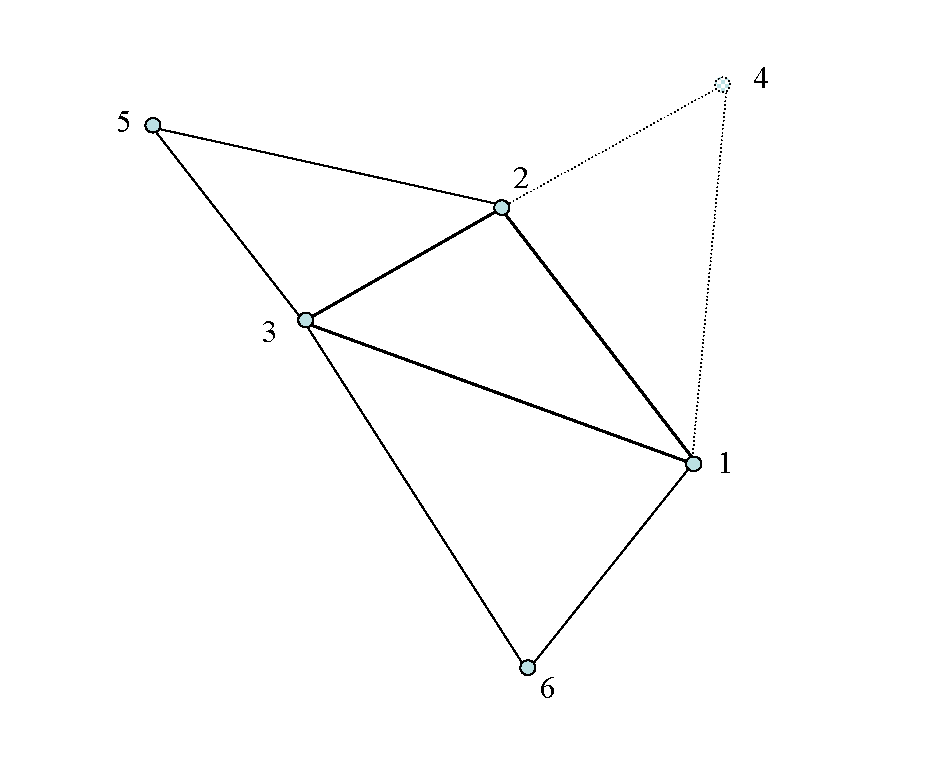
virtual and symmetric element outside of the edge as described in Figure 4. In the case of free rotation at the edge, the
normal strain is vanished. From Equation 4, this leads
to:(7)
In Equation 5 the fourth row of the
matrix is then changed to:(8)
The clamped condition is introduced by the symmetry in out-of-plane displacement, that is, . This implies . The fourth row of the matrix in Equation 5 is then changed
to:(9)
Figure 4. Virtual Element Definition for Boundary Conditions Application
1Batoz J.L. and Dhatt G., “Modeling of Structures by finite
element”, volume 3, Hermes, 1992.
Sabourin F. and Brunet M., “Analysis of plates and shells with a
simplified three-node triangle element”, Thin-walled Structures, Vol. 21, pp.
209-223, Elsevier, 1995.