Gear type joints are more complex than other kinematic joints. They use the
Lagrange Multiplier method and are compatible with all other Lagrange Multiplier
kinematic conditions and incompatible with all classical kinematic
conditions.
Three examples of these joints are explained:
Rotational gear type joint
Rack and pinion joint
Differential gear joint
Mass and inertia may be added to all nodes. MPC joints impose relations between nodes velocities. The MPC cannot be applied to the translational degrees of freedom of a node without mass or the rotational degrees of freedom of a node without inertia.
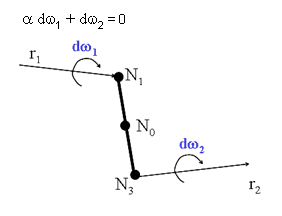
Rotational Gear Type Joint
This joint is used to impose a rotational velocity relation between input and output node as:
Figure 1. Rotational Type Joint
Translational velocities of gear joint nodes are constrained by a rigid link relation. For the
rotational degrees of freedom, a scale factor is imposed between
velocities of nodes
N 1 and
N 2 , measured in their local
coordinates. The corresponding constraint equations
are:
α
(
Δ
ω
1
⋅
r
1
)
+
(
Δ
ω
2
⋅
r
2
)
=
0
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqySde2aae
WaaeaacqqHuoarcqaHjpWDdaWgaaWcbaGaaGymaaqabaGccqGHflY1
caWGYbWaaSbaaSqaaiaaigdaaeqaaaGccaGLOaGaayzkaaGaey4kaS
YaaeWaaeaacqqHuoarcqaHjpWDdaWgaaWcbaGaaGOmaaqabaGccqGH
flY1caWGYbWaaSbaaSqaaiaaikdaaeqaaaGccaGLOaGaayzkaaGaey
ypa0JaaGimaaaa@4DF7@
Δ
ω
1
⋅
s
1
=
0
,
Δ
ω
2
⋅
s
2
=
0
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeuiLdqKaeq
yYdC3aaSbaaSqaaiaaigdaaeqaaOGaeyyXICTaam4CamaaBaaaleaa
caaIXaaabeaakiabg2da9iaaicdacaGGSaGaaeiiaiaabccacqqHuo
arcqaHjpWDdaWgaaWcbaGaaGOmaaqabaGccqGHflY1caWGZbWaaSba
aSqaaiaaikdaaeqaaOGaeyypa0JaaGimaaaa@4C1C@
Δ
ω
1
⋅
t
1
=
0
,
Δ
ω
2
⋅
t
2
=
0
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeuiLdqKaeq
yYdC3aaSbaaSqaaiaaigdaaeqaaOGaeyyXICTaamiDamaaBaaaleaa
caaIXaaabeaakiabg2da9iaaicdacaGGSaGaaeiiaiaabccacqqHuo
arcqaHjpWDdaWgaaWcbaGaaGOmaaqabaGccqGHflY1caWG0bWaaSba
aSqaaiaaikdaaeqaaOGaeyypa0JaaGimaaaa@4C1E@
Where,
Δ
ω
1
=
ω
1
−
ω
0
,
Δ
ω
2
=
ω
2
−
ω
0
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeuiLdqKaeq
yYdC3aaSbaaSqaaiaaigdaaeqaaOGaeyypa0JaeqyYdC3aaSbaaSqa
aiaaigdaaeqaaOGaeyOeI0IaeqyYdC3aaSbaaSqaaiaaicdaaeqaaO
GaaiilaiaabccacaqGGaGaeuiLdqKaeqyYdC3aaSbaaSqaaiaaikda
aeqaaOGaeyypa0JaeqyYdC3aaSbaaSqaaiaaikdaaeqaaOGaeyOeI0
IaeqyYdC3aaSbaaSqaaiaaicdaaeqaaaaa@4F08@
are relative rotational
velocities of nodes N 1 and
N 2 in respect of the rigid
body rotational velocity.
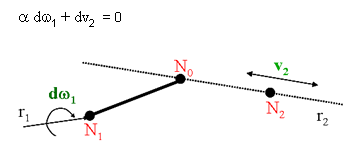
Rack and Pinion Joint
This joint allows the rotational velocity of node to be transformed to a translational velocity
as:
Figure 2. Rack and Pinion Type Joint
The constraint equations for these velocities are:
(1)
Δ
ω
1
=
ω
1
−
ω
0
, Δ
ω
2
=
ω
2
−
ω
0
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeuiLdqKaeq
yYdC3aaSbaaSqaaiaaigdaaeqaaOGaeyypa0JaeqyYdC3aaSbaaSqa
aiaaigdaaeqaaOGaeyOeI0IaeqyYdC3aaSbaaSqaaiaaicdaaeqaaO
GaaiilaiaabccacaqGGaGaeuiLdqKaeqyYdC3aaSbaaSqaaiaaikda
aeqaaOGaeyypa0JaeqyYdC3aaSbaaSqaaiaaikdaaeqaaOGaeyOeI0
IaeqyYdC3aaSbaaSqaaiaaicdaaeqaaaaa@4F08@
(2)
α (
Δ
ω
1
⋅
s
1
) + (
Δ
V
2
⋅
s
2
) = 0
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqySde2aae
WaaeaacqqHuoarcqaHjpWDdaWgaaWcbaGaaGymaaqabaGccqGHflY1
caWGZbWaaSbaaSqaaiaaigdaaeqaaaGccaGLOaGaayzkaaGaey4kaS
YaaeWaaeaacqqHuoarcaWGwbWaaSbaaSqaaiaaikdaaeqaaOGaeyyX
ICTaam4CamaaBaaaleaacaaIYaaabeaaaOGaayjkaiaawMcaaiabg2
da9iaaicdaaaa@4D07@
(3)
α (
Δ
ω
1
⋅
t
1
) + (
Δ
V
2
⋅
t
2
) = 0
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqySde2aae
WaaeaacqqHuoarcqaHjpWDdaWgaaWcbaGaaGymaaqabaGccqGHflY1
caWG0bWaaSbaaSqaaiaaigdaaeqaaaGccaGLOaGaayzkaaGaey4kaS
YaaeWaaeaacqqHuoarcaWGwbWaaSbaaSqaaiaaikdaaeqaaOGaeyyX
ICTaamiDamaaBaaaleaacaaIYaaabeaaaOGaayjkaiaawMcaaiabg2
da9iaaicdaaaa@4D09@
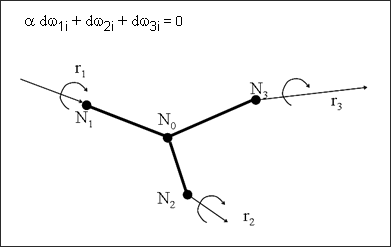
Differential Gear Joint
This joint is used to impose rotational velocity relations between an input node and two output
nodes as:
Figure 3. Differential Joint Type
The rotational velocities of a differential gear joint are constrained by the
relations:
(4)
α (
Δ
ω
1
⋅
r
1
) + (
Δ
ω
2
⋅
r
2
) + (
Δ
ω
3
⋅
r
3
) = 0
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqySde2aae
WaaeaacqqHuoarcqaHjpWDdaWgaaWcbaGaaGymaaqabaGccqGHflY1
caWGYbWaaSbaaSqaaiaaigdaaeqaaaGccaGLOaGaayzkaaGaey4kaS
YaaeWaaeaacqqHuoarcqaHjpWDdaWgaaWcbaGaaGOmaaqabaGccqGH
flY1caWGYbWaaSbaaSqaaiaaikdaaeqaaaGccaGLOaGaayzkaaGaey
4kaSYaaeWaaeaacqqHuoarcqaHjpWDdaWgaaWcbaGaaG4maaqabaGc
cqGHflY1caWGYbWaaSbaaSqaaiaaiodaaeqaaaGccaGLOaGaayzkaa
Gaeyypa0JaaGimaaaa@58BC@
(5)
α (
Δ
ω
1
⋅
s
1
) + (
Δ
ω
2
⋅
s
2
) + (
Δ
ω
3
⋅
s
3
) = 0
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqySde2aae
WaaeaacqqHuoarcqaHjpWDdaWgaaWcbaGaaGymaaqabaGccqGHflY1
caWGZbWaaSbaaSqaaiaaigdaaeqaaaGccaGLOaGaayzkaaGaey4kaS
YaaeWaaeaacqqHuoarcqaHjpWDdaWgaaWcbaGaaGOmaaqabaGccqGH
flY1caWGZbWaaSbaaSqaaiaaikdaaeqaaaGccaGLOaGaayzkaaGaey
4kaSYaaeWaaeaacqqHuoarcqaHjpWDdaWgaaWcbaGaaG4maaqabaGc
cqGHflY1caWGZbWaaSbaaSqaaiaaiodaaeqaaaGccaGLOaGaayzkaa
Gaeyypa0JaaGimaaaa@58BF@
(6)
α (
Δ
ω
1
⋅
t
1
) + (
Δ
ω
2
⋅
t
2
) + (
Δ
ω
3
⋅
t
3
) = 0
MathType@MTEF@5@5@+=
feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqySde2aae
WaaeaacqqHuoarcqaHjpWDdaWgaaWcbaGaaGymaaqabaGccqGHflY1
caWG0bWaaSbaaSqaaiaaigdaaeqaaaGccaGLOaGaayzkaaGaey4kaS
YaaeWaaeaacqqHuoarcqaHjpWDdaWgaaWcbaGaaGOmaaqabaGccqGH
flY1caWG0bWaaSbaaSqaaiaaikdaaeqaaaGccaGLOaGaayzkaaGaey
4kaSYaaeWaaeaacqqHuoarcqaHjpWDdaWgaaWcbaGaaG4maaqabaGc
cqGHflY1caWG0bWaaSbaaSqaaiaaiodaaeqaaaGccaGLOaGaayzkaa
Gaeyypa0JaaGimaaaa@58C2@