The PITCH function computes the second angle, in radians, of a body-3
Yaw-Pitch-Roll rotation sequence.
Format
PITCH(I, J)
Description
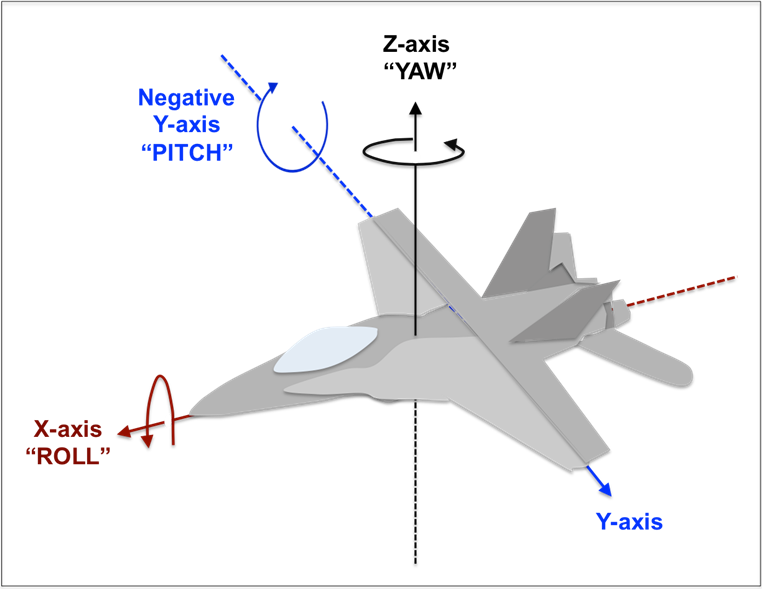
Given two coordinate systems, I and J, which are initially
having the same orientation, this rotation sequence is defined as follows:
First, rotate in a counterclockwise direction about the z-axis of the I
coordinate system [YAW].
Second, rotate counterclockwise about the negative y-axis of the I
coordinate system [PITCH].
Third, rotate counterclockwise about the x-axis of the I coordinate system
[ROLL].
The first argument, marker I, must be specified. The second argument, marker
J, is optional.
Arguments
I
The marker whose rotational displacement is to be computed.
J
The marker with respect to which the rotational displacement is to be
computed. This argument is optional. If omitted, it defaults to the ground
coordinate system.