HyperCrash allows you to import and position an FTSS dummy. The process is similar to that when working within the LS-DYNA profile.
| 1. | Import the dummy file using the File menu. |
| 2. | From the Safety menu, select Dummy Positioner [NEW]. |
The dummy parts are listed in a hierarchy in the Dummy Posit[FTSS] panel.
| 3. | Click the names of body sections to expand in order to display the parts that make up each section. |
| 4. | Click a part listed in the Dummy Posit[FTSS] panel to highlight it in the graphic area. |
In the lower section of the Dummy Posit[FTSS] panel, the Max Stop, Current, and Min Stop values for the currently selected part are displayed.
| 5. | Change the angles by using the up or down arrows for each value, by typing in values directly, or by clicking  and using the mouse to manipulate the object graphically. and using the mouse to manipulate the object graphically. |
| Note: | If the values for the degree of freedom are 'grayed out,' they cannot be changed. |
Control the H-point.
The H-point is controlled by manipulating the model at the top level in the Dummy Posit[FTSS] panel.
| 1. | Select the top level item of the file in the Dummy Posit[FTSS] panel. |
| 2. | With the H-Point menu set to Select Node, click the node selection button ( ) in the Dummy Posit[FTSS] panel, and then select a node in the model display. ) in the Dummy Posit[FTSS] panel, and then select a node in the model display. |
| 3. | Enter values in the Rx:, Ry:, and Rz: fields to manipulate the rotation of the dummy. |
or
With the H-Point menu set to Enter Coordinates, enter coordinates for Hx:, Hy:, and Hz:.
| Note: | To see more information about the alpha, beta, and theta for each part, click the expand arrows (  ) at the upper-right hand corner of the Dummy Posit[FTSS] panel. ) at the upper-right hand corner of the Dummy Posit[FTSS] panel. |
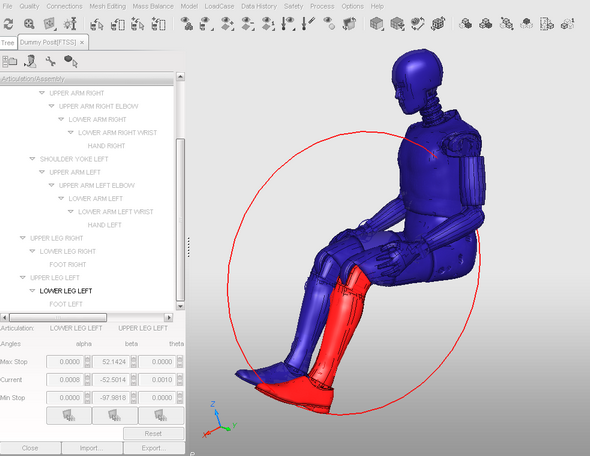
Positioning an FTSS dummy. Model courtesy FTSS.
Go to
Dummy Positioner





