Using Virtual Wind Tunnel for ultraFluidX
Use Virtual Wind Tunnel for ultraFluidX to perform an external aerodynamic analysis of a vehicle.
- Install the most recent version of ultraFluidX. If you are running VWT on a Windows system, you'll need to have a Linux installation of ultraFluidX available for running the solver. If you are running VWT on a Linux system with a supported GPU, no further configuration steps are necessary. The uFX solver is included in the installation package. If you wish to run a different version of the solver than the one that is shipped with the VWT package, the installation directory of the alternate solver installation can be set under .
- The geometry of the vehicle is described by a surface mesh which is in Nastran or STL format. Unlike many other CFD solvers, the ultraFluidX package does not require a water tight surface mesh. This greatly reduces the pre-processing burden when simulating complex geometries.
- The surface mesh of the vehicle is expected to be in meters [m]. If it is not, use the scale option to scale it to meters.
- It is assumed that the wind tunnel has its inflow surface at the minimum x-coordinate of the wind tunnel and the flow is going in the positive x-direction. The y-direction is perpendicular to the flow direction and parallel to the wind tunnel ground. The z-direction is perpendicular to the ground of the wind tunnel.
Invoke Virtual Wind Tunnel for ultraFluidX
Import the Surface Mesh Model
There are two files that need to be imported for this tutorial. The first is a surface mesh model in standard Nastran format. The second is an STL file used to model moving reference frames.
On Windows platforms, the model files are located at: <installation_directory>/hwx/help/VWT/Models/.
On Linux platforms, the model is located at: <installation_directory>/.altair/hwx/help/VWT/Models/.
-
From the Home group,
Files tool group, click the Open Model tool.
 Figure 1.
Figure 1. -
In the Import File dialog, navigate to the same model
directory and select mrfRegions.stl.
The MRF regions are added to the model.The Model Browser on the left side of the workspace now shows the model structure with two assemblies and the corresponding part names.
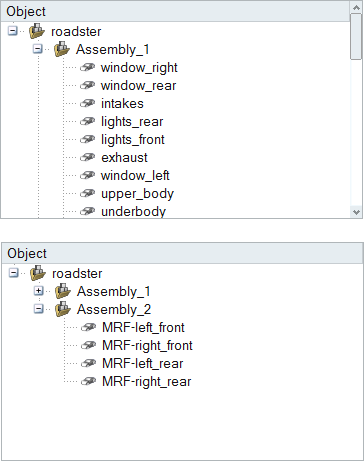
Figure 2.
Define Wind Tunnel Dimensions
-
From the nanoFluidX ribbon,
Setup group, click
the Edit Tunnel tool.

Figure 3.A tunnel is generated around the model. -
Using either the Property Editor or the text boxes in the
modeling window, modify the dimensions of the wind
tunnel.
- Enter a value of 50.0 m for the length.
- Enter a value of 25.0 m for the width.
- Enter a value of 16.0 m for the height.
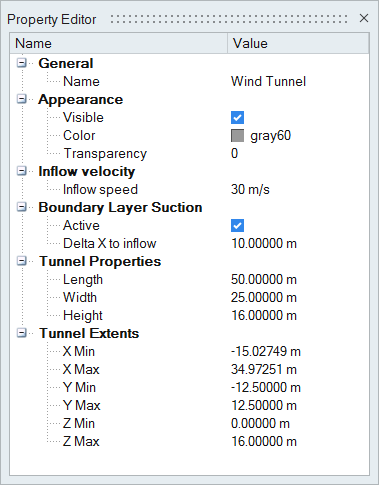
Figure 4.
Identify Parts
Use the Identify Parts tool to define types of parts like wheels, heat exchangers or body panels, which require specific modeling techniques for the CFD run.
Specify the Heat Exchangers
-
In order to better view the heat exchangers, first isolate the relevant
parts.
-
In the Model Browser, click
 to activate the Search and Filter toolbar.
to activate the Search and Filter toolbar.
- In the text field, enter rad.
- Select all the filtered parts.
- Right-click and select Isolate from the context menu or press I.
Only the parts needed for specifying the heat exchangers are displayed. Figure 5.
Figure 5. -
In the Model Browser, click
-
From the nanoFluidX ribbon,
Setup group,
Identify Parts tool
group, click the Identify Heat Exchanger
tool.

Figure 6. -
Specify the inflow component for the first heat exchanger.
-
Select rad_1_in in the modeling window.
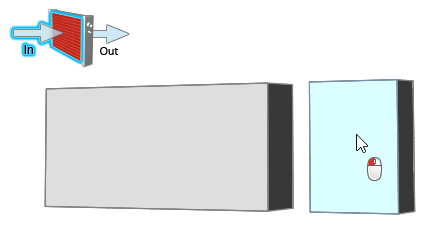
Figure 7.
-
Select rad_1_in in the modeling window.
-
Specify the outflow component for the first heat exchanger.
-
Select rad_1_out in the modeling window.
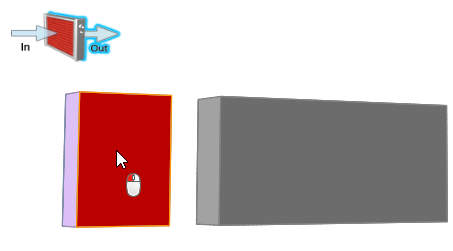
Figure 8.
As soon as the inlet and outlet of the heat exchanger is defined, VWT automatically identifies rad_1_frame as the connecting wall between those two surface regions. -
Select rad_1_out in the modeling window.
-
Create a second heat exchanger by clicking
 in the Heat Exchangers dialog.
in the Heat Exchangers dialog.
-
Specify the inflow component for the second heat exchanger.
-
Select rad_2_in in the modeling window.
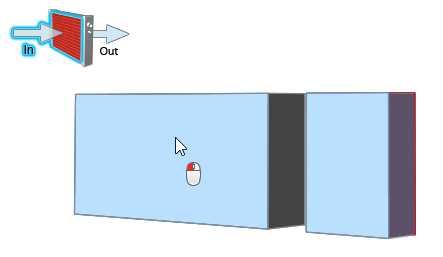
Figure 9.
-
Select rad_2_in in the modeling window.
-
Specify the outflow component for the second heat exchanger.
-
Select rad_2_out in the modeling window.
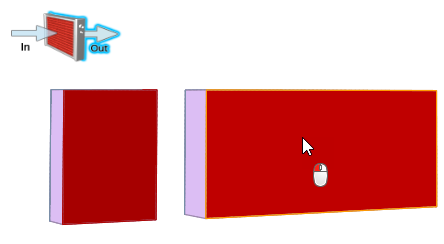
Figure 10.
VWT automatically identifies rad_2_frame as the connecting wall between those two surface regions. -
Select rad_2_out in the modeling window.
Specify the Wheels
You need to select the parts forming the wheel, for example tire and rim. All other parameters like center of rotation, axis of rotation, and the angular velocity (in RPM) are computed automatically. If multiple parts are selected, VWT will group the parts into one or more wheels. For example, if you select the brake disc, the rim and the tire of the left front wheel, all three parts will be identified as wheel_1. If you also select the rim and the tire of the left rear wheel, those parts will be grouped into wheel_2.
-
From the nanoFluidX ribbon,
Setup group,
Identify Parts tool
group, click the Identify Wheels tool.
Figure 11. -
From the secondary tool set, click the Identify Wheel
tool.

Figure 12. -
Select the tire, rim, hub, and brake disk of the front-left wheel.
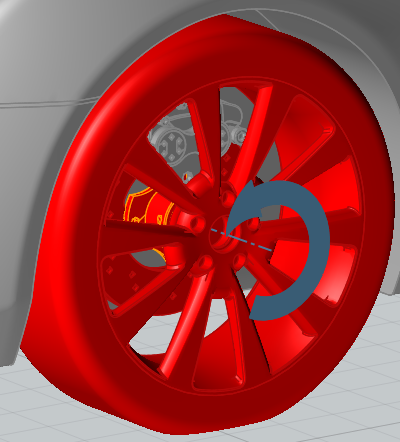
Figure 13.Note: You may need to rotate and zoom the model to get a better view of the wheel hub. -
For the back wheels, select just the rim and tire.
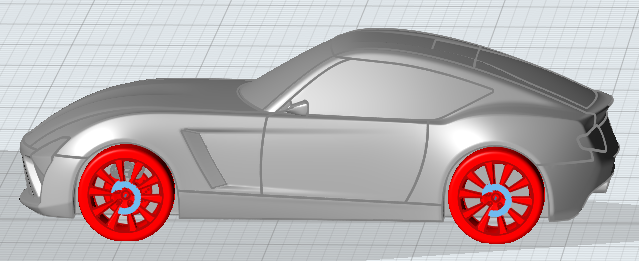
Figure 14.
Specify the MRF Regions
MRF regions define a volume in which the governing equations are solved in a rotating reference frame. This transformation of the equations can lead to higher accuracy for rotating bodies due the addition of centrifugal and Coriolis forces.
-
From the nanoFluidX ribbon,
Setup group,
Identify Parts tool
group, click the Identify Wheels tool.
Figure 15. -
From the secondary tool set, click the MRF tool.

Figure 16.A guide bar appears below the tool. Wheel should be highlighted by default. -
Select the grey disk on the front-left wheel as the MRF region.
The region is highlighted blue.

Figure 17. -
Click
 on the guide bar to confirm your selection.
on the guide bar to confirm your selection.
-
Repeat the above process for the rear wheels.
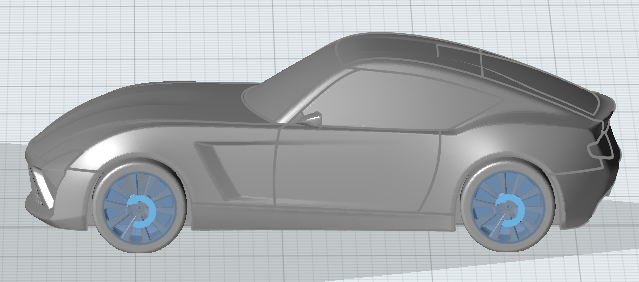
Figure 18.The angular velocity and center of rotation of the rotating frames are extracted from the wheel definitions.
Review Identified Parts
-
From the nanoFluidX ribbon,
Setup group,
Identify Parts tool
group, click the Parts tool.
Figure 19. -
In the Parts dialog, check that you identified the correct
parts as wheels and heat exchangers.
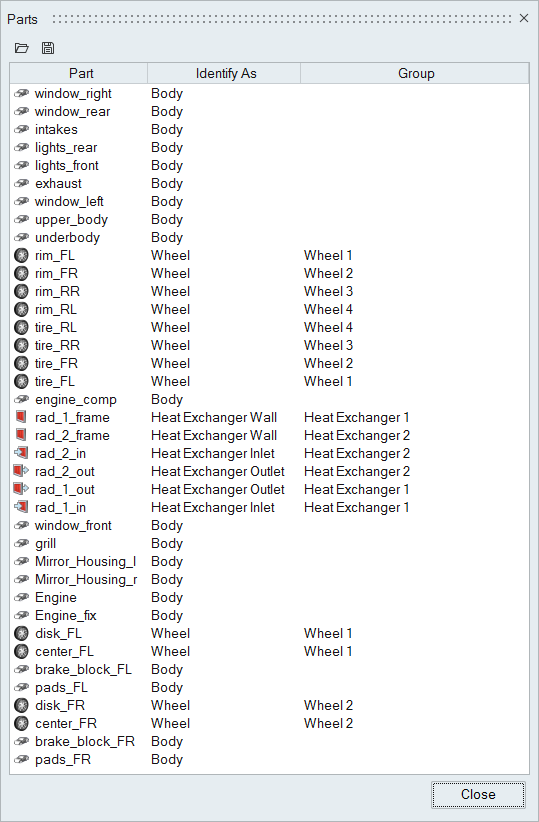
Figure 20. - Optional:
Click
 to export the part
definitions as an .xml template
file for use with later simulations.
to export the part
definitions as an .xml template
file for use with later simulations.
Define the Mesh Controls
Use the Mesh Controls tool to define regions with a user-defined volume element size.
Set the Far Field Element Size
-
From the nanoFluidX ribbon,
Setup
tools, click the Mesh Controls
tool.
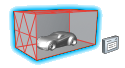
Figure 21. -
From the secondary tool set, click the Far Field tool.
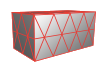
Figure 22.
Generate Box Refinement Zones Around the Body
-
From the nanoFluidX ribbon,
Setup
group, click the Mesh Controls
tool.
Figure 23. -
From the secondary tool set, click the body of the Box
tool.
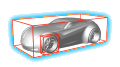
Figure 24. -
Enter a value of 3 for Level and press
Enter.
The element size is changed to 0.0250 m.
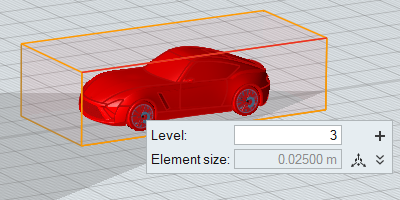
Figure 25. -
In the Property Editor, edit the dimensions of the
refinement zone so that the length is 5.0 m, the width is
2.0 m, the height is 2.0 m,
and X Min extent is -1.0 m.
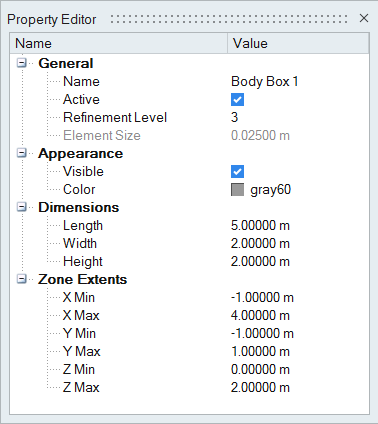
Figure 26. -
In the microdialog, click .
A second box refinement zone is generated.
-
Click
once more.
A third box refinement zone is generated.
-
In the Property Editor, edit the dimensions of the
refinement zone so that the length is 9.0 m, the width is
4.0 m, the height is 3.0 m,
and the X Min extent is -1.0 m.
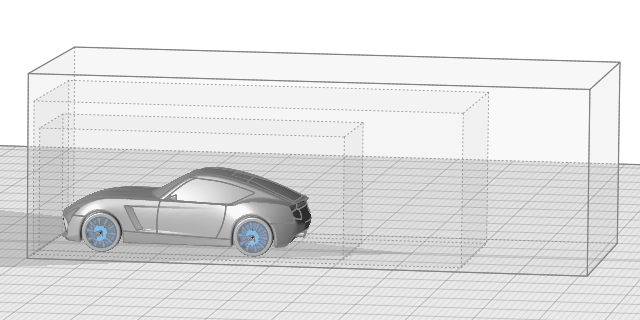
Figure 27.
Generate Box Refinement Zones Around Parts
-
From the nanoFluidX ribbon,
Setup
group, click the Mesh Controls
tool.
Figure 28. -
From the secondary tool set, click wheel of the Box
tool.
Figure 29. -
Modify the refinement zone's dimensions.
-
In the microdialog, click
 .
.
- Enter a value of 0.50 m for length.
- Enter a value of 0.20 m for width.
- Enter a value of 0.15 m for height.
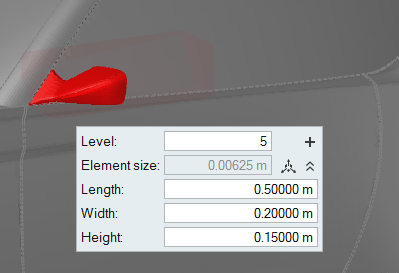
Figure 30. -
In the microdialog, click
Generate a Body-Fitted Refinement Zone
-
From the nanoFluidX ribbon,
Setup
group, click the Mesh Controls
tool.
Figure 31. -
From the secondary tool set, click the body of the Offset tool.
Figure 32. -
Set the number of layers to 8.
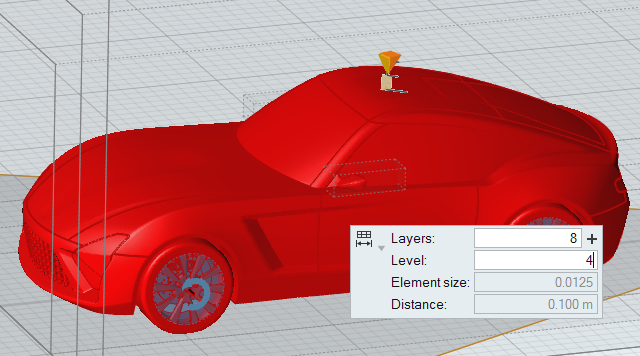
Figure 33.
Generate Part-Fitted Refinement Zones
-
From the nanoFluidX ribbon,
Setup
group, click the Mesh Controls
tool.
Figure 34. -
From the secondary tool set, click the wheel of the Offset tool.

Figure 35. -
Set the number of layers to 5.
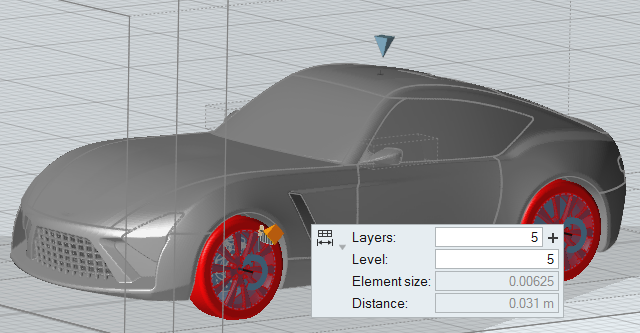
Figure 36. -
Click .
A second part-fitted refinement zone is created around the four wheels.
-
Set the number of layers to 10.
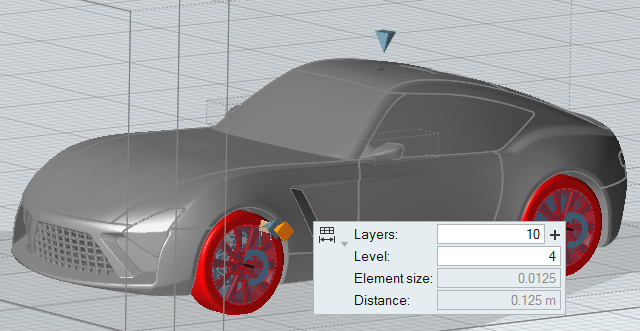
Figure 37.
Review Mesh Controls
-
From the nanoFluidX ribbon,
Setup group,
Mesh Controls tool group, click the Zones tool.
 Figure 38.
Figure 38. -
Double-check the refinement zones and make sure they match what's displayed in
the image below.
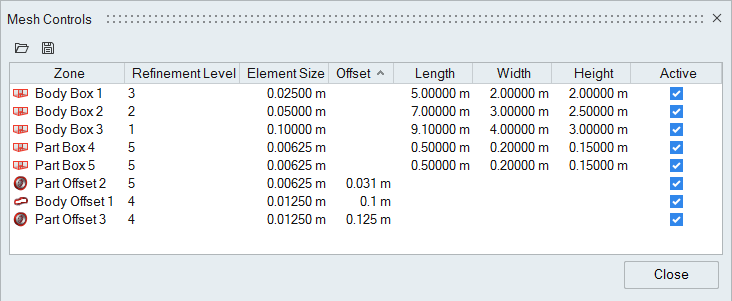
Figure 39. - Optional:
Click to export the mesh control
definitions as an .xml template
file for use with later simulations.
Define the Belt System
-
From the nanoFluidX ribbon,
Setup group, click
the Belt System tool.
Figure 40.By default, five patches are created on the wind tunnel ground for modeling the belt system.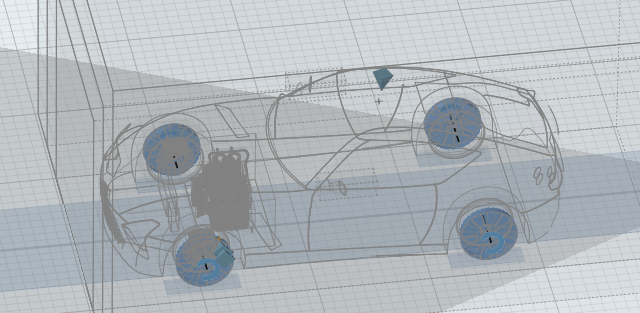
Figure 41.
Define the Output Frequency
-
From the nanoFluidX ribbon, Output group, click the
General Output tool.
Figure 42.The ultraFluidX Output Controls dialog opens.
Submit Job
-
From the nanoFluidX ribbon,
Run group, click the
Run VWT tool.
Figure 43. -
Accept all other default parameters.
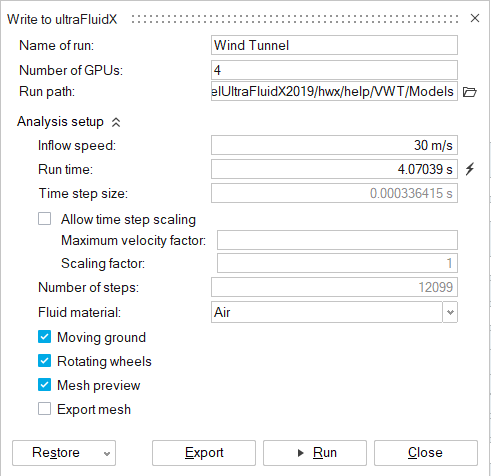
Figure 44.
Plot Aero Coefficients
-
From the nanoFluidX ribbon,
Run group, click the
Plot Aero Coefficients tool.
Figure 45. -
Browse to the path you defined as the default run directory and select
uFX_coefficients_Inst.txt .
A graph of the instantaneous lift, drag, and side force coefficients is displayed.
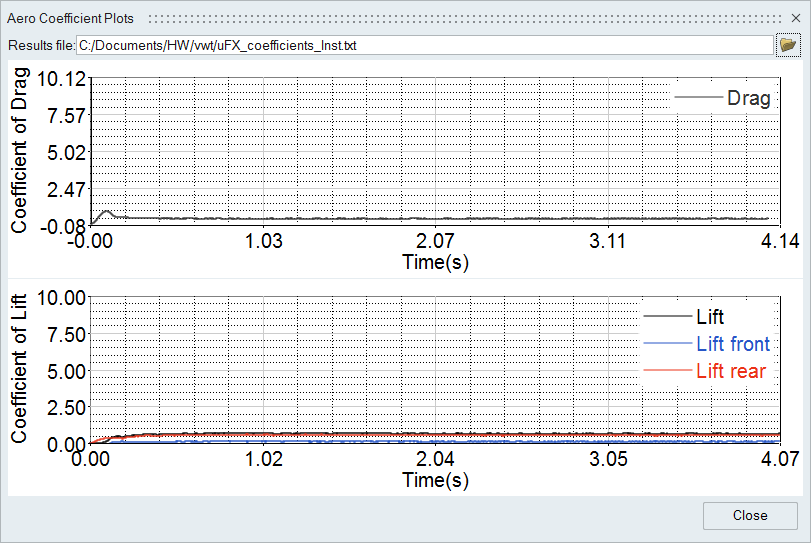
Figure 46. -
Browse to the default directory once more and select
uFX_coefficients_Avg.txt .
A graph of the time averaged lift, drag, and side force coefficients is displayed.
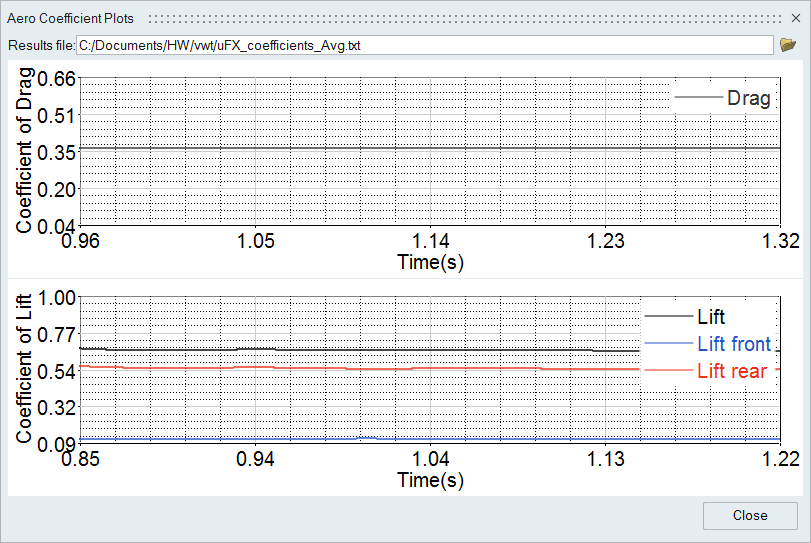
Figure 47.