控制器
控制器用于通过反馈控制回路来达到期望(目标)值。
转动电机和平动电机默认使用一个控制器,但小对话框中有一个选项  允许您禁用该控制器。
允许您禁用该控制器。

图 1. 转动电机控制器选项

图 2. 平动电机控制器选项
允许您禁用该控制器。图 1. 转动电机控制器选项
图 2. 平动电机控制器选项
控制器类型
“属性编辑器”中有两种可用的控制器类型:
- PID
- 软约束(仅适用于角度转动电机和位移平动电机)
注: 一般建议使用一个控制器,但是如果控制器不符合预期要求,则可以将其关闭。选定的轮廓函数将会在不使用反馈回路的情况下直接使用。
PID 控制器
PID 是一种常规的比例-积分-微分 (PID) 控制方式。如果控制器的响应不符合预期,则可以在属性编辑器中调整增益:
- 比例增益
- 积分增益
- 微分增益
软约束控制器
软约束不是常规控制器,更像是允许出现少量违规的数学约束。(这是软约束得名的原因所在;与之相比,硬约束不允许出现任何违规。)
通过调整“属性编辑器”中的各个因子,您可以更改软约束的运行状态。
- 比例因子
- 微分因子
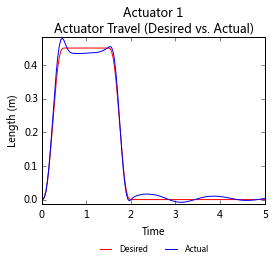
示例
如下图所示,软约束控制器超出了期望的步进-停歇-步进轮廓函数。