Embedded Category: C2407, F280x
Block Category: TI 16-bit DMC, TI 32-bit DMC
Block Inputs
•QE: fractional value of position between zero and one. The current quadrature encoder count is multiplied by the inverse of the maximum counts per revolution resulting in a value between zero and one.
•Dir: 1 = forward direction, -1 = backward
Block Output
•Wr: fraction of maximum speed (“Base Electrical Frequency”)
Operating Mode Availability
•Simulation mode: YES
•C code generation mode: YES
The QEP Speed block determines the rotational speed based on modulo-encoder tick counts.
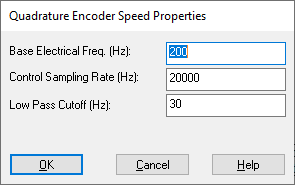
Base Electrical Frequency: Indicates the maximum rotational speed of the electrical field between poles.
Control Sampling Rate: Indicates sampling rate of the control running on the target.
Low Pass Cutoff: A low-pass filter is applied to the successive differencing used to determine speed from successive QEP measurements. Speed changes above the cut-off frequency will be attenuated.