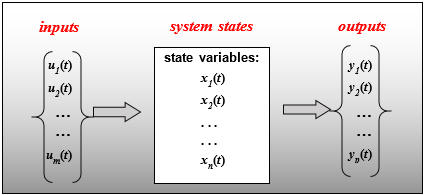
Model ElementGse is an abstract modeling element that defines a generic dynamic
system. The dynamic system is characterized by a vector of inputs u, a vector of dynamic
states x, and a vector of outputs y. The state vector x is defined through
a set of differential equations.
Class Name
Gse
Description
The output vector y is defined by a set of algebraic equations. The image below
illustrates the concept of a dynamic system. Figure 1.
Attribute Summary
Name
Property
Modifiable by
command?
Designable?
id
Int ()
No
label
Str ()
Yes
no
Int ()
ns
Int ()
x
Reference
("Array")
Yes
y
Reference
("Array")
Yes
u
Reference
("Array")
Yes
ic
Reference
("Array")
Yes
static_hold
Bool ()
Yes
implicit
Bool ()
function
Function
("GESSUB")
Yes
routine
Function
()
active
Bool ()
Yes
Usage
# Defined in a compiled user-written subroutineGse (no=int, function=userString, routine=stringoptional_attributes)# Defined in a Python functionGse (no=int, function=userString, routine=functionPointeroptional_attributes)
Attributes
Defined in a compiled user-written subroutine
no
Integer
An integer that specifies the number of outputs in the GSE.
no > 0
This attribute is mandatory.
function
String
Specifies the list of parameters that are passed from the data file to the
user-defined subroutines GSESUB, GSEXX, GSEXU, GSEYX and GSEYU. You must write GSESUB.
The others, GSEXX, GSEXU, GSEYX and GSEYU, are optional. When these are not written,
MotionSolve will generate the partial derivatives
automatically via finite differencing.
The function attribute is mandatory.
routine
String
Specifies an alternative name for the user subroutine. The name consists of two
pieces of information, separated by "::". The first is the pathname to the shared
library containing the function that computes the response of the user-defined
Variable. The second is the name of the function in the shared
library that does the computation. An example is: routine="/staff/Altair/engine.dll::myGse"
"/staff/Altair/ engine.dll is
the dll
"myGse"
is the function within this DLL that performs the calculations
The attribute routine is optional. When not specified,
routine defaults to GSESUB.
Defined in a Python function
no
Integer
An integer that specifies the number of outputs in the GSE.
no > 0
This attribute is mandatory.
function
String
Specifies the list of parameters that are passed from the data file to the
user-defined subroutines GSESUB, GSEXX, GSEXU, GSEYX and GSEYU. You must write GSESUB.
The others, GSEXX, GSEXU, GSEYX and GSEYU, are optional. When these are not written,
MotionSolve will generate the partial derivatives
automatically via finite differencing.
The function attribute is mandatory.
routine
Pointer to a callable function in Python
An example is: routine=myGse
myGse is a Python function or method
that can be called from wherever the model resides.
The attribute routine is optional. When not specified it defaults
to GSESUB.routine
Optional attributes - available to all variants
id
Integer
Specifies the element identification number. This number must be unique among all
the GSE objects in the model.
This attribute is optional. MotionSolve will
automatically create an ID when one is not specified.
Range of values: id > 0
label
String
Specifies the name of the GCON object.
This attribute is optional. When not specified, MotionSolve will create a label for you.
u
Reference to an Array object of type U.
Specifies the ARRAY used to store the input u of this
GSE. You can use the ARYVAL() function with this ID to access the
states in a MotionSolve expression. You can also use this
ID in SYSFNC and SYSARY to access the input values from a user subroutine.
This attribute is optional.
y
Reference to an Array object of type Y.
Specifies the ARRAY used to store the output, y, of this
GSE. You can use the ARYVAL() function with the ID of this array
to access the states in a MotionSolve expression. You can
also use this ID in SYSFNC and SYSARY to access the output values from a user
subroutine.
This attribute is optional.
x
Reference to an Array object of type X,
Specifies the ARRAY used to store the states x of this
GSE. You can use the ARYVAL() function with the ID of this
Array to access the states in a MotionSolve expression. You can also use this ID in SYSFNC and
SYSARY to access the state values from a user subroutine.
This attribute is mandatory.
ic
Specifies the Array used to store the initial values of the
states, x of this GSE. You can use the ARYVAL() function
with the id of this Array to access the states
in a MotionSolve expression. You can also use this ID in
SYSFNC and SYSARY to access the initial state values from a user subroutine.
static_hold
Boolean
Specifies whether the value of the dynamic state is kept fixed or not during static
equilibrium and quasi static solutions.
True implies that the value of the dynamic state is kept
constant during static and quasi-static solutions.
False implies that the value of the dynamic state is allowed to
change during static equilibrium or quasi-static solutions.
This attribute is optional. When not specified it defaults to
False.
implicit
Boolean
A Boolean that specifies whether the differential equations defining the states are
implicit or explicit.
True implies that the differential equations are implicitly and
the equations define the residue of the differential equations.
False implies that the differential equations are explicitly
defined and the equations define the time derivative of the states.
This attribute is optional. When not specified, implicit defaults
to False.
active
Bool
Select one from True or False.
True indicates that the element is active in the model and it
affects the behavior of the system
False indicates that the element is inactive in the model and
it does not affect the behavior of the system. It is almost as if the entity was
removed from the model, of course with the exception that can be turned "ON" when
desirable.
The attribute active is optional. When not specified,
active defaults to True
Example
Use a GSE to define the LuGre model of
friction.
################################################################################
# Model definition #
################################################################################def
sliding_block (out_name):
m = Model (output=out_name)
# Model units, Gravity and Integrator settings
units = Units (mass="KILOGRAM", length="METER", time="SECOND", force="NEWTON")
grav = Accgrav (jgrav=-9.800)
gstiff = Integrator (error=1e-5)
# Points and Vectors that will be reused
p0 = Point (10,0,0)
ux = Vector (1,0,0)
uy = Vector (0,1,0)
uz = Vector (0,0,1)
# Ground part and global coordinate system
grnd = Part (ground=True)
oxyz = Marker (body=grnd, label="Global CS")
# Block
blk = Part (mass=1, ip=[4.9e-4,4.9e-4,4.9e-4], label="Block")
blk.cm = Marker (body=blk, qp=p0, zp=p0+uz, xp=p0+ux, label="Block CM")
# Translational joint between Block and Ground along global X-axis
im = Marker (body=blk, qp=p0, zp=p0+ux, xp=p0+uz, label="Joint Marker on Ground")
jm = Marker (body=grnd, qp=p0, zp=p0+ux, xp=p0+uz, label="Joint Marker on Ground")
jnt = Joint (type="TRANSLATIONAL", i = im, j = jm, label="Trans Joint")
# An external force trying to move the block
sfojm = Marker (body=grnd, qp=p0, zp=p0+ux, xp=p0+uz, label="Sforce reaction")
sf = Sforce (type="TRANSLATION", actiononly=True, i=im, j=sfojm, label="Actuation Force", function = "3*sin(2*pi*time)")
# Friction in the joint
m.lugre = LuGre(joint=jnt)
# Some requests of interest
m.r1 = Request (type="DISPLACEMENT", i=im, j=jm, rm=jm, comment="Joint displacement")
m.r2 = Request (type="FORCE", i=im, j=jm, rm=jm, comment="Joint forces")
m.r3 = Request (type="VELOCITY", i=im, j=jm, rm=jm, comment="Joint velocity")
so = Output (reqsave=True)
# Return the model you just definedreturn m
###############################################################################
###############################################################################
###############################################################################
m = sliding_block("lugre1")
m.simulate (type="DYNAMICS", end=4, dtout=.01)
# Change the static friction coefficient and continue simulation
m.lugre.mus=0.5
m.simulate (type="DYNAMICS", end=8, dtout=.01)
Comments
See Properties for an
explanation about what properties are, why they are used, and how you can extend these.