A controller is provided as a way to try and reach a desired (target) value by means of
a feedback control loop.
Motors and actuators use a controller by default, but have an option on the microdialog
that
allows you to disable the controller. Figure 1. Controller Option for Motors Figure 2. Controller Option for Actuators
Types of Controllers
There are two types of controllers available from the Property Editor:
PID
Soft Constraint (available for angle motors and displacement actuators only)
Note: In general it is recommended to use a controller, but if your controller is not
doing what you want, try turning it off. The selected profile function will be used
directly with no feedback loop involved.
PID Controller
PID is a conventional Proportional-Integral-Derivative (PID) control scheme. If the
controller does not respond the way you expect, you can adjust the gains in the Property
Editor:
Proportional Gain
Integral Gain
Derivative Gain
Soft Constraint Controller
A soft constraint is not a conventional controller, but more like a mathematical constraint
with some violation allowed. (That is why it is a soft constraint, as opposed to a hard
constraint which allows no violation.)
You can change the behavior of a soft constraint by adjusting the factors in the Property
Editor:
Proportional Factor
Derivative Factor
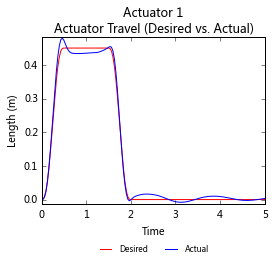
Example
This plot shows a case of a soft constraint controller overshooting the desired
step-dwell-step profile function.
 that
allows you to disable the controller.
that
allows you to disable the controller.